Тема: Проектирование пневмопривода для трубопроводной арматуры
Характеристики работы
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
ВВЕДЕНИЕ 5
1. ТЕОРЕТИЧЕСКИЕ АСПЕКТЫ ФУНКЦИОНИРОВАНИЯ
ПНЕВМАТИЧЕСКОГО ПРИВОДА 7
1.1 Классификация пневматического привода 7
1.2 Патентный обзор пневматических приводов 12
2. РАСЧЕТ ТРУБОПРОВОДНОЙ АРМАТУРЫ ПО KV 14
2.1 Место установки трубопроводной арматуры 14
2.2 Определение максимальной пропускной способности трубопроводной
арматуры 16
3. РАСЧЕТ ПНЕВМАТИЧЕСКОГО ПРИВОДА 20
3.1 Составление пневматической схемы. Расчет усилий 20
3.2 Расчет привода в программном пакете Fisher First 2.0 26
3.3 Определение потребного расхода привода 28
3.4 Моделирование схемы пневмопривода в программе FluidSim-P 29
3.5 Построение переходного процесса 31
3.6 Определение показателей надежности привода 35
4. ПОДБОР И ОПИСАНИЕ ПНЕВМАТИЧЕСКОГО ОБОРУДОВАНИЯ 42
4.1 Подбор цифрового позиционера 42
4.2 Описание позиционера 44
4.3 Подбор фильтра-регулятора давления 46
4.5 Подбор компрессора 49
4.6 Описание компрессора 51
ЗАКЛЮЧЕНИЕ 54
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 55
ПРИЛОЖЕНИЯ 57
Приложение А. Спецификация
📖 Аннотация
📖 Введение
Следовательно, целью данной работы является расчет оптимального пневматического привода для автоматизации трубопроводной арматуры, основываясь на исходных данных.
Практическая значимость данной работы заключается в детальной интерпретации стимулов применения пневматического привода компаниями. Следовательно, для компаний такое подробное объяснение причин способствует широкому использованию с дальнейшей оптимизацией процессов производства.
Данная работа состоит из четырех глав, в ходе первой главы рассмотрены теоретические аспекты пневматического привода, далее осуществлен расчет трубопроводной арматуры по Kv и в результате был выбран клеточный клапан Fisher ET, основываясь на исходных данных.
Основным результатом является расчет пневматического привода, проведены
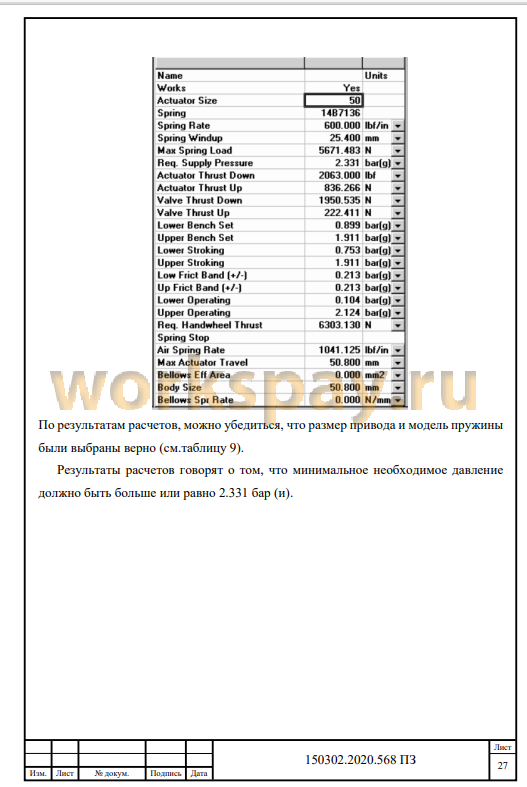
расчеты в программном пакете Fisher 2.0. В ходе расчетов был выбран регулирующий клапан Fisher ET клеточного типа с линейным движением штока и равнопроцентной пропускной характеристикой. В дополнении, были определены усилия, действующие на плунжер, и выбрана пружина 14В7136Х012. Кроме того, определен размер привода равным 50. Для подтверждения корректности данных расчетов параметры пневматического привода были определены также в программном пакете Fisher 2.0. и, следовательно, размер привода и модель пружины были выбраны верно. Следующим шагом осуществлялся подбор цифрового позиционера DVC6200 и фильтра-регулятора Fisher 67CFR, а также компрессор по параметрам необходимой подачи и давления.
✅ Заключение
При выборе пневматического привода, учитывались следующие критерии: долговечность, надежность, время срабатывания, рабочие усилия, максимальное давление питания. По данным критериями был отброшен мембранный пневматический привод, который имеет меньший рабочий ход и меньшие рабочие усилия. Важно было обеспечить время закрытия рубопроводной арматуры за 12 секунд (положение безопасности Нормально-закрытый), фактическое время составило менее 1 секунды, что в 12 раз меньше требуемого. Был осуществлен выбор цифрового позиционера, который обладает средствами связи по протоколу HART. Данный позиционер легко заменяет существующие аналоговые датчики положения, устанавливаемые на пневматические приводы. Данный контроллер обладает бесконтактной обратной связью по положению, что увеличивает его надежность. Также, были подобран фильтр-регулятор Fisher 67 CFR, который обладает номиналом фильтрации в 5 микрон и имеет внутренний сбросной клапан При подборе компрессора были учтены потери давления по длине, которые составляют 4,53 бар. Данный компрессор обладает осушителем, что предотвращает засорение каналов, образование коррозии, образование конденсата.
Внедрение пневматического привода в производство позволяет автоматизировать процесс регулирования рабочей среды, протекающей в трубопроводе. Пневматический привод дистанционно управляет арматурой, что исключает участие оператора в процессе, его роль сводится только к вводу программы управления и контролю за действиями приборов системы.
📕 Список литературы
🖼 Скриншоты