Тема: Модернизация электроприводов мостового крана
Характеристики работы
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
1 ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
1.1 Основные режимы работы крановых механизмов
1.2 Механическая часть
1.3 Устройство и работа крана
2 ВЫБОР TИПА ЭЛЕКТРОПРИВОДА, ДВИГАТЕЛЯ И СИЛОВОГО
ПРЕОБРАЗОВАТЕЛЯ 17
2.1 Общие сведения о применениях различных электроприводов 17
2.2 Требования предъявляемые к электроприводу главного подъема 18
2.3 Основные исходные данные для проект ирования
2.4 Предварительный выбор мощности и электродвигателя
2.5 Расчет тахограммы и нагрузочной диаграммы
2.6 Проверка выбранного двигателя по нагреву и перегрузке
2.7 Выбор преобразователя частоты
2.7.1 Краткое описание современных преобразователей частоты.
2.7.2 Характеристики преобразователей частоты
3 РАЗРАБОТКА СИСТЕМЫ АВТОМАТИЧЕСКОГО УГ1РАВЛЕ11ИЯ
ЭЛЕКТРОПРИВОДОМ 35
3.1 Построение системы автоматического управления с ориентацией ноля ротора в системе координат с управляемым скольжением
3.2 Синтез регуляторов
3.2
1 Синтез регуляторов преобразованных токов статора 40
2 Синтез регулятора потокосцепления ротора 43
3 Синтез регулятора электромагнит ного момента 45
4 С интез регулятора угловой скорости
3.3.1 Постановка задачи
3.3.2 Краткое описание приложения Siniulink пакета MATLAB
3.4 Моделирование частотно-регулируемого электропривода..
3.4.1 Математическая модель объекта управления 52
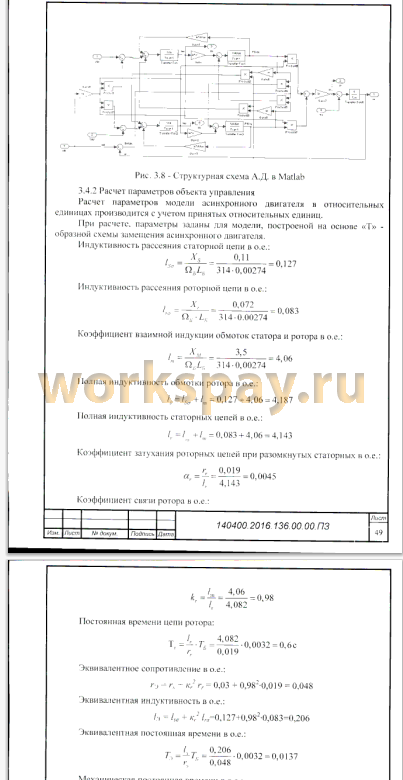
3.4.2 Расчет параметров объекта управления 59
3.4.3 Математическая модель системы управления электроприводом 60
4 РАЗРАБОТКА СИСТЕМБ1 ТЕХНОЛОГИЧЕСКОЙ АВ ТОМАТИКИ 65
4.1 Описание контроллера Овен 11ЛК 110-30 65
4.2 1 (рограм.ма для контроллера 71
5 ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ПРОЕКТА 80
5.1 Введение 80
5.2 Исходные данные для расчета и капитальные затраты ио вариантам 83
.84
85
5.3 Определение годового экономического эффекта
5.3.1 Затраты на энергетические ресурсы
3.3.1 Постановка задачи
3.3.2 Краткое описание приложения Siniulink пакета MATLAB
3.4 Моделирование частотно-регулируемого электропривода..
3.4.1 Математическая модель объекта управления 52
3.4.2 Расчет параметров объекта управления 59
3.4.3 Математическая модель системы управления электроприводом 60
4 РАЗРАБОТКА СИСТЕМБ1 ТЕХНОЛОГИЧЕСКОЙ АВ ТОМАТИКИ 65
4.1 Описание контроллера Овен 11ЛК 110-30 65
4.2 1 (рограм.ма для контроллера 71
5 ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ПРОЕКТА 80
5.1 Введение 80
5.2 Исходные данные для расчета и капитальные затраты ио вариантам 83
.84
85
5.3 Определение годового экономического эффекта
5.3.1 Затраты на энергетические ресурсы
5.3.2 Амортизационные отчисления 86
5.3.3 Стоимость ремонта 87
5.3.4 Снижение заработном платы основных рабочих 87
5.3.5 Определение срока окупаемости 88
6 БЕЗОГ1АСНОСТБ ЖИЗНЕДЕЯТЕЛЫ1ОСТИ 91
6.1 Введение 91
6.1.2 Краткая характеристика модернизируемого объекта 94
6.2 Безопасность труда 94
6.2.) Определение опасных и вредных факторов производства.
95
6.2.1 Шум 95
6.2.2 Ос ве те и н ос т ь 96
6.2.3 Вибрация 97
6.2.4 Микроклимат 97
6.3 Электробезопасность 98
6.3.1 Расчет заземления 99
6.3.2 Обеспечение безопасности труда 99
6.3.3 Риск 101
6.3.4 Интенсивность труда 102
6.4 Чрезвычайные ситуации 103
6.4.1 Чрезвычайная ситуация 104
6.4.2 Пожаробезопасность 105
6.5 Эргономика 109
ЗАКЛЮЧЕНИЕ 113
БИБЛИОГРАФ! 1ЧЕСКИЙ CI1ИСОК 114
35
📖 Аннотация
📖 Введение
Основной причиной широкого применения регулируемого привода в крановом хозяйстве является снижение энергопотребления при работе крана на 40-60%, которое достигается за счет значительного снижения вращающихся маховых масс лебедки глав!-ого подъема .
Применение частотных преобразователей позволяет использовать асинхронные двигатели с короткозамкнутым ротором общего применения, а не специализированные устройства с фазным ротором. Маховый момент ротора таких двигателей в разы меньше аналогичных двигателей с фазным ротором, а стоимость их в несколько раз меньше по сравнению со специализированными к ра но в Ь) м и д ви гател я м и.
Вследствие этого, эффект в экономическом аспекте от внедрения частотнорегулируемого электропривода является суммой из экономии электроэнергии и Си иже н и я э ксп л у ата пион пых затрат.
Срок окупаемости такого крапа, в зависимости от грузоподъемности и интенсивности работы составляет от 4 до 8 лет (в зависимости от грузоподъемности и интенсивности использования).
Для более точной оценки экономической и технологической эффективности внедрения частотно-регулируемого электропривода предлагается оснастить таким электроприводом один из кранов и экспериментально замерить расход электроэнергии до и после внедрения, а также оценить динамические нагрузки, удобство в управлении и друз ие технические параметры крана. Наиболее важное значение для успешного проведения этой работы имеет правильный выбор преобразователя частоты, как гео его техническим параметрам, так и по маркетинговым соображениям, с учетом опыта использования преобразователей другими предприятиями.
Стоимость предлагаемого проекта состоит из стоимости нового электрооборудования (преобразователя частоты с тормозным резистором), стоимости работ по проектированию, монтажу, настройке и наладке электропривода крана, проведения исследовательских работ по оценке его технико-экономических показателей и экономической эффективности. На металлургических предприятиях работают мостовые краны общею назначения (крюковые, грейферные, магнитные, магнито-грейферные) и металлургические
литейные, для раздевания слитков, колодцевые, посадочные и др.).
Конструкция кранов в основном определяется их назначением и спецификой технологического процесса. Но ряд узлов, например механизмы подъема и передвижения, выполняются однотипными для кранов различных видов. 1(оэтому имеется много общего в вопросах выбора и эксплуатации электрооборудования кранов.
Электрооборудование кранов металлургических цехов работает, как правило, в тяжелых условиях: высокая запыленность и загазованность, увеличенная температура среды или ее резкие колебания (от минусовой до +55-75 °C), повешенная влажность (до 85-90%), влияние химических реагентов. В связи с этим оно должно выбираться в соответствующем конструктивном исполнении.
Оборудование кранов стандартизировано, поэтому краны различные по назначению и конструкции комплектуются серийно выпускаемым электрооборудованием. Схемы управления отдельными кранами отличаются, что связано со спецификой соответствующих цехов металлургических предприятий и назначением кранов. К электрооборудованию кранов предъявляют следующие требования: обеспечение высокой производительности, надежность работы, безопасность обслуживания, простота эксплуатации и ремонта и др.
На металлургических предприятиях широко применяются крюковые мостовые краны общего назначения при технологических, погрузочно- разгрузочных, монтажных, ремонтных, складских и других видах работ. У этих кранов большая номенклатура типоразмеров и исполнений, их грузоподъемность достигает 800 т, однако наиболее широко используются крапы грузоподъемностью от 5 до 320 i трех-, четырех- и пятидвигательные. Для привода механизмов этих кранов наиболее широко применяются трехфазные асинхронные электродвигатели с фазным ротором (реже - с коротко замкнутым)
✅ Заключение
В работе также представлены схемы подключений, программа для контроллера фирмы «Овен» ПЛК110. В экономической части работы были получены следующие экономические показатели:
капитальные затраты: 1052401 руб.
Безопасное обслуживание и эксплуатация предполагает соблюдение всех норм техники безопасности, представленных в разделе техники безопасности.
Графическая часть включает в себя 6 листов формата А1:
- Кинематическая схема;
- 11агруточная диаграмма;
-Силовые цепи электродвигателя. Схема электрическая принципиальная;
-Привод электродвигателя. Схема электрическая структурная;
-Схема технологической автоматики;
- Электропривод. Схема электрическая функциональная.
11а основании данного проекта возможно внедрение частотнорегулируемого электропривода в производстве, промышленности и других отраслях, где используются грузоподъемные машины. Главными преимуществами привода являются: обеспечение плавною пуска и использование короткозамкнутых асинхронных двигателей, что значительно снижает затраты на обслуживание приводов и увеличивает срок службы оборудования.
Модернизация мостовых кранов - отличная возможность сэкономить средства, поскольку модернизация кранов и ремонт грузоподъемных механизмов всегда обходится существенно дешевле, чем покупка нового крана.
Модернизация кранов -это качественное улучшение всего оборудования мостового крана. В большинстве случаев ни к чему приобретать новый кран, а достаточно просто купить крановое оборудование и усовершенствовать уже имеющийся.
📕 Список литературы
🖼 Скриншоты