Тема: Автоматизация производства усилительных пластин лонжеронов легкового автомобиля
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
1.1 Обзор автодетали 10
1.2 Основные операции сборочного участка 13
1.3 Соединение лонжерона и усилительной пластины 17
2 Фиксация и позиционирование деталей 21
2.1 Расчёт усилия прижима пневматических зажимов 21
2.2 Датчик расстояния 25
2.3 Проектирование захватного и транспортировочного устройств . 28
2.4 Проектирование сварочной станции 30
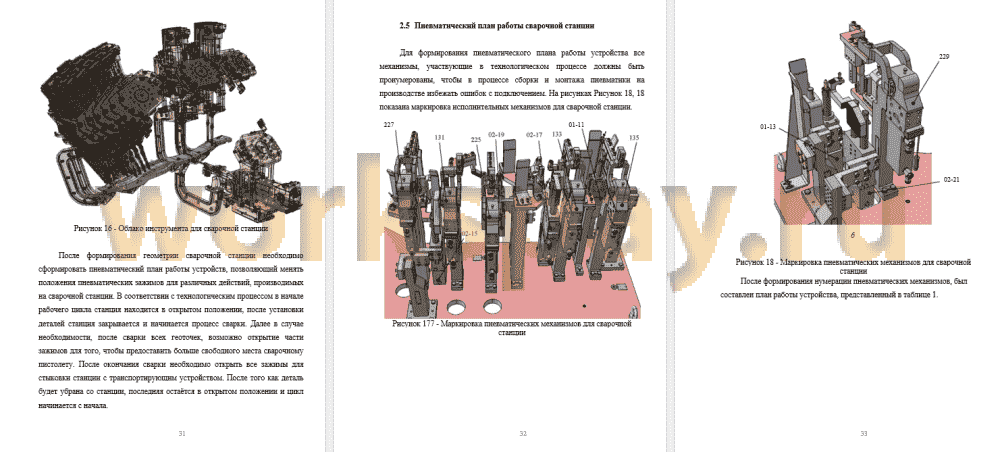
2.5 Пневматический план работы сварочной станции 32
2.6 Определение нагрузки на оси промышленного робота 35
2.7 Описание движений промышленного робота 38
3 Технологическое оборудование процесса сборки 40
3.1 Определение типа сварочного пистолета 40
3.2 Конфигурация робота в процессе сварки и нанесения клея 42
3.3 Обслуживание колпачков сварочного пистолета 45
3.4 Нанесение клеевого шва 47
4 Калибровка рабочего инструмента 51
5 Калибровка рабочей зоны робота 55
6 Настройка и программирование 62
6.1 Настройка оборудования робота 62
6.2 Программирование робота 65
Заключение 70
Список используемых источников 72
📖 Введение
Положительный эффект от внедрения промышленных роботов обычно заметен одновременно с нескольких сторон: растет производительность труда, улучшается качество конечного продукта, снижаются затраты на производство, улучшаются условия труда для человека, и наконец, переход предприятия с выпуска одного вида продукции на другой значительно облегчается.
Однако для достижения столь обширного и многогранного положительного эффекта от внедрения промышленных роботов на уже работающие ручные производства, необходимо предварительно рассчитать планируемые затраты на сам процесс внедрения, на стоимость робота, а также взвесить, адекватна ли вообще сложность вашего производства и технологического процесса — плану модернизации при помощи установки промышленных роботов.
Ведь иногда производство настолько упрощено изначально, что установка роботов просто нецелесообразна и даже вредна. К тому же «для наладки, обслуживания, программирования роботов — потребуются квалифицированные кадры, а в процессе работы — вспомогательные устройства и т. д. это важно учитывать заранее.
Так или иначе, роботизированные безлюдные решения на производствах приобретают сегодня все большую актуальность хотя бы потому, что вредное влияние на здоровье человека сводится к минимуму. Прибавим сюда понимание того, что полный цикл обработки и монтажа осуществляется быстрее, без перерывов на перекур и без ошибок, свойственных любому производству, где вместо робота действует живой человек. Человеческий фактор, после настройки роботов и запуска технологического процесса, практически исключается.
На сегодняшний день ручной труд в большинстве случаев замещается трудом робота манипулятора: инструментальный захват, фиксация
инструмента, удержание заготовки, подача ее в рабочую зону. Ограничения накладывают лишь: грузоподъемность, ограниченность рабочей зоны, предварительно запрограммированные движения.
Промышленный робот способен, тем не менее, обеспечить:
• высокую производительность, благодаря быстрому и точному позиционированию
• лучшую экономичность, так как не нужно платить зарплату людям, которых он собой заменяет, достаточно одного оператора
• высокое качество — точность порядка 0.05 мм, низкая вероятность появления брака
• безопасность для здоровья людей, например в силу того, что при покраске теперь контакт людей с лакокрасочными материалами исключается
• наконец, рабочая зона робота строго ограничена, а обслуживание ему требуется минимальное, даже если рабочая среда химически агрессивна, материал робота выдержит это воздействие.
Исторически первый промышленный робот, изготовленный по патенту, был выпущен в 1961 году компанией Unimation Inc для завода General Motors в Нью-Джерси. Последовательность действий робота записывалась в виде кода на магнитный барабан и выполнялась в обобщенных координатах. Для осуществления действий робот использовал гидроусилители. Данная технология потом была передана японской Kawasaki Heavy Industries и английской Guest, Keen and Nettlefolds. Так производство роботов от Unimation Inc несколько расширилось.
...
✅ Заключение
• разработана схема крепления усилительных пластин для левого лонжерона легкового автомобиля;
• разработан процесс соединения деталей с применением технологии нанесения клеевого состава и точечной контактной сварки;
• распределено положение точек сварки усилительных пластин по приоритету сварки и по прижимному усилию сварочного пистолета;
• определён тип и технология клепания в соответствии с технологическим процессом, а также подобран соответствующий клёпочный инструмент и вспомогательное оборудование для обслуживания и настройки процесса клёпки;
• расчётные значения усилий прижима для пневматических зажимов транспортирующего устройства;
• сформирован массив данных по определению пространственных ограничений в процессе нанесения клеевого состава, а также точечной контактной варки;
• разработан пневматический план последовательной работы прижимных устройств для сварочной оснастки станции и захватного устройства;
• получены расчётные данные по динамической и статической нагрузке на оси промышленных роботов, на основании которых был определён и подобран тип и грузоподъёмность промышленного робота, обеспечивающего выполнение заданных функций;
• сформировано объёмное и плоское сечение сварочного пистолета, позволяющее определить геометрию и ширину открытия электродов сварочного пистолета;
• в процессе программирования промышленных роботов получена конфигурация всех осей робота, позволяющая оптимизировать перемещение промышленного робота в пространстве;
• разработан механизм калибрования инструмента и стационарного оборудования на основании калибровки методом измерительных спиц;
• разработан способ калибрования рабочей зоны робота с применением вспомогательного устройства камертона, монтируемого на рабочем инструменте робота;
• разработан план расположения рабочих и блокировочных зон промышленных роботов.
📕 Список литературы
🖼 Скриншоты