Тема: Система управления мобильным роботом
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
Введение 7
1 Анализ рынка и актуальности изделия 14
2 Выбор способа ориентации в пространстве 19
3 Разработка структурной схемы 24
4 Способ связи между узлами платформы 35
4.1 Выбор способа связи между микроконтроллером и
микрокомпьютером 35
4.2 Подготовка протокола связи между микроконтроллером и
микрокомпьютером 37
4.2.1 Символьная передача отклонения 38
4.2.2 Непосредственная передача отклонения 41
5 Разработка электрической схемы соединений 44
6 Разработка конструкции 47
7 Разработка управления исполнительными механизмами 49
7.1 Разработка алгоритма управления для символьной передачи
отклонения 49
7.2 Разработка алгоритма управления для непосредственной передачи
отклонения 58
8 Экономическая эффективность 65
Заключение 66
Список используемой литературы 68
Приложение А Программный код алгоритма управления для символьной передачи отклонения Raspberry Pi 71
Приложение Б Программный код алгоритма управления для символьной
передачи отклонения Arduino 76
Приложение В Программный код алгоритма управления для непосредственной передачи отклонения Raspberry Pi 80
Приложение Г Программный код алгоритма управления для непосредственной передачи отклонения Arduino 84
📖 Введение
Так, например, высокое качество покраски деталей при массовом производстве, может быть обеспечено с помощью роботов, без рисков для человека (рисунок 1).
Высокая точность, скорость, совмещённая с безопасностью, присуща хорошо настроенным гибким производственным системам в стекольной и фарфорофаянсовой промышленности (рисунок 2).
Космическая отрасль на заре своего существования получала роботов. Со времён «космической гонки», человечество использует мобильные робототехнические комплексы для исследования планет и спутников Солнечной системы. Они способны воспроизводить сенсорные, коммуникационные, управляющие и двигательные функции человека Тенденция к расширению автоматизации сохраняется. Так, роботехнический комплекс «Канадарм2» (рисунок 3) перемещает оборудование и материалы в пределах международной космической станции, помогает космонавтам работать в открытом космосе, обслуживает полезную нагрузку на поверхности МКС.
Подводная деятельность человека так же не обходится без роботов.
Например, для обследования континентального шельфа создан робототехнических комплекс «Шельф» (рисунок 4).
Всё большее значение робототехнические комплексы получают в армии. Разведка, целеуказание, корректировка артиллерийского огня, разминирование, действия в условиях химического и биологического заражения, непосредственная поддержка войск - все эти задачи могут на себя взять роботы уже сегодня [7].
Обеспечивая безопасность для оператора, робототехнический комплекс разминирования «Уран-6» способен проделывать проходы в минно-взрывных заграждениях, обезвреживать минные заграждения. Работать урбанизированных локальных районах и малолесных горных областях (рисунок 5).
Для ведения боя создаются боевые машины, оснащённые различным вооружением, от пулемётов до противотанковых управляемых ракет. Примером такой машины, что уже прошла боевые действия, является боевой многофункциональный робототехнический комплекс «Уран-9»
(рисунок 6).
...
✅ Заключение
В начале данной бакалаврской работы было проведено исследование областей применения робототехнических систем и выявлено наиболее перспективное направление развития.
В первом разделе, после анализа уже существующих робототехнических систем, была обоснована актуальность текущей разработки.
Во втором разделе определены методы позиционирования, широко используемые в мире, объяснён их выбор и их применимость. Осуществлён выбор способа навигации - техническое зрение и контрастная линия.
В третьем разделе была разработана структурная схема платформы, были выбраны все основные электротехнические компоненты для мобильного робота.
В четвёртом разделе выбран способ связи между микроконтроллером и одноплатным компьютером - с помощью интерфейса UART и кабеля USB. Подготовлены два алгоритма приёма-передачи.
В пятом разделе была разработана и представлена схема электрическая соединений, включающая все электротехнические компоненты и способы их соединения.
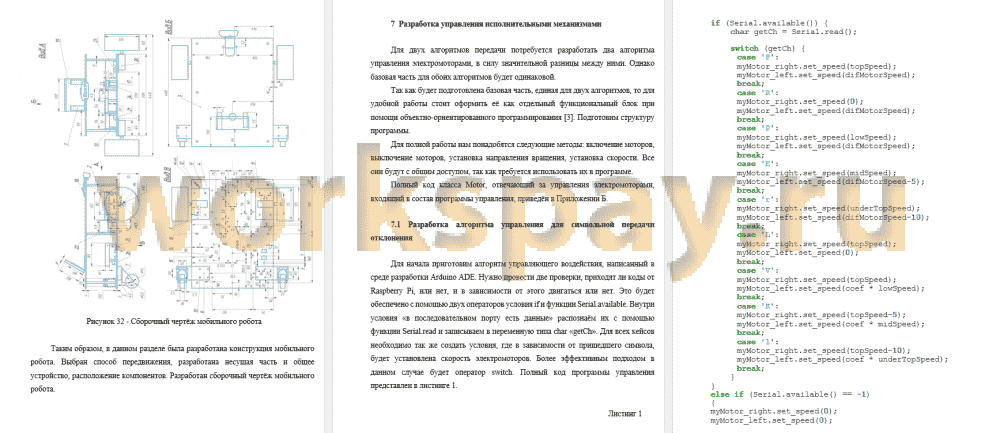
В шестом разделе была представлена конструкция мобильного робота: четырёхколёсная платформа из двух ярусов малого размера. Разработан сборочный чертёж.
В седьмом разделе созданы два алгоритма работы мобильного робота и их программная реализация, проведена их настройка, проведены экспериментальные испытания образца.
В восьмом разделе произведена оценка экономической эффективности.
Результатом выполнения данной выпускной квалификационной работы стали разработка и физическое воплощение автономного мобильного робота, осуществляющего движение по разным поверхностям с помощью технического зрения.
📕 Список литературы
🖼 Скриншоты