Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
ℹ️Настоящий учебно-методический информационный материал размещён в ознакомительных и исследовательских целях и представляет собой пример учебного исследования. Не является готовым научным трудом и требует самостоятельной переработки.
Введение 3
1 Построение траектории перелета с низкой околоземной орбиты 5
1.1 Постановка задачи 5
1.2 Построение траектории перелета 7
2 Коррекция орбитального движения космического аппарата 10
2.1 Задача длительного пребывания в окрестности L1. Уравнения в вариациях 10
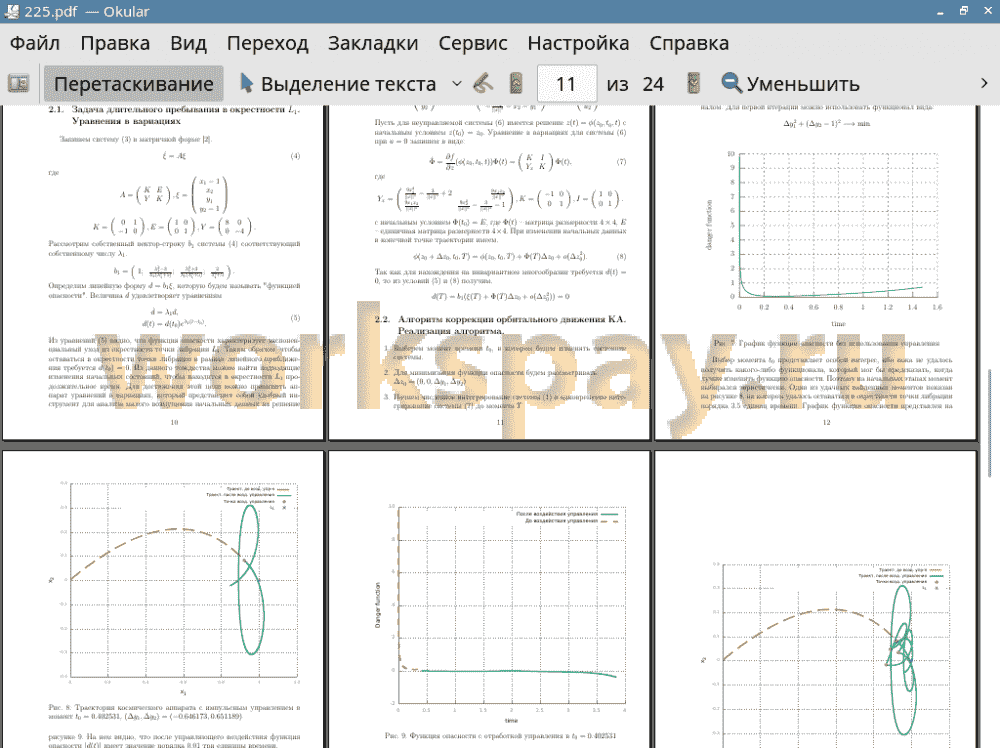
2.2 Алгоритм коррекции орбитального движения КА. Реализация алгоритма 11
Заключение 17
Список литературы 18
Приложение 19
📖 Введение
Точки либрации, также называемые точками Лагранжа, являются частными решениями ограниченной задачи трех тел [5]. В системе Земля-Солнце существует 5 точек либрации. Эти точки разделяют на две категории: коллинеарные и треугольные. Важно отметить, что коллинеарные точки являются неустойчивыми, а треугольные — устойчивые. Точка либрации L1 находится на расстоянии порядка 1.5 миллиона километров от центра Земли на линии Земля-Солнце в сторону Солнца, а L2, соответственно, находится на расстоянии порядка 1.5 миллиона километров от центра Земли в сторону от Солнца. Окрестности этих точек можно отнести к околоземному пространству, и они представляют интерес для космических проектов. Так, например, ЕКА и НАСА запустили комический аппарат SOHO в точку L1 для наблюдения за Солнцем, в 2001 году НАСА запустили КА WMAP в окрестность L2 для наблюдения за реликтовым излучением. В статье [1] рассматривается построение орбиты в окрестности точки либрации L2 для КА “Миллиметрон”, который предназначен для исследования различных объектов вселенной в миллиметровом и инфракрасном диапазонах. Данный аппарат конструируют в НПО имени С. А. Лавочкина. Окрестности коллинеарных точек либрации также можно использовать для маневров в околоземном космическом пространстве. Существуют задачи, в рамках которых управляемое движение в окрестностях точек либрации используется в контексте противодействия коментно-астероидной опасности. Таким образом, изучения движения в этих областях пространства актуально для современной космической навигации.
Рис. 1: Расположение точек Лагранжа
✅ Заключение
В представленной работе построена траектория перелета с низкой околоземной орбиты в окрестности коллинеарной точки либрации L1 в пространстве положений. Для достижения инвариантного многообразия, на котором космический аппарат находится в окрестности точки либрации длительное время, были построены импульсные управления в виде мгновенных приращений по скоростям в плоскости эклиптики. Для построения импульсных управлений использовался аппарат уравнений в вариациях. Далее была разработана программа на языке C++, которая в автоматическом режиме при уходе из инвариантного многообразия строит импульсные управления, оптимальные по затратам. С помощью данной программы удалось удержать космический аппарат в окрестности точки либрации L1 на временном промежутке порядка 1.5 лет при реализации трех импульсных управлений.