Тема: Система управления линейным актуатором пропорционального гидрораспределителя
Характеристики работы
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
1. Конструкция пропорционального гидравлического распределителя прямого действия с линейным позиционным актуатором 8
1.1 Механика пропорционального гидрораспределителя
прямого действия 8
1.2 Функциональная схема гидравлического распределителя 10
1.3 Характеристики пропорционального гидрораспределителя 13
2. Математическое моделирование режимов работы линейным
актуатором с позиционным управлением 16
3. Система измерения линейного положения актуатора 18
3.1 Измерительный линейный дифференциальный трансформатор 18
3.2 Технические требования, предъявляемые к датчикам положения 36
4. Микроконтроллерная система управления актуатором 64
4.1 Микроконтроллерная система управления пропорциональным гидрораспределителем 64
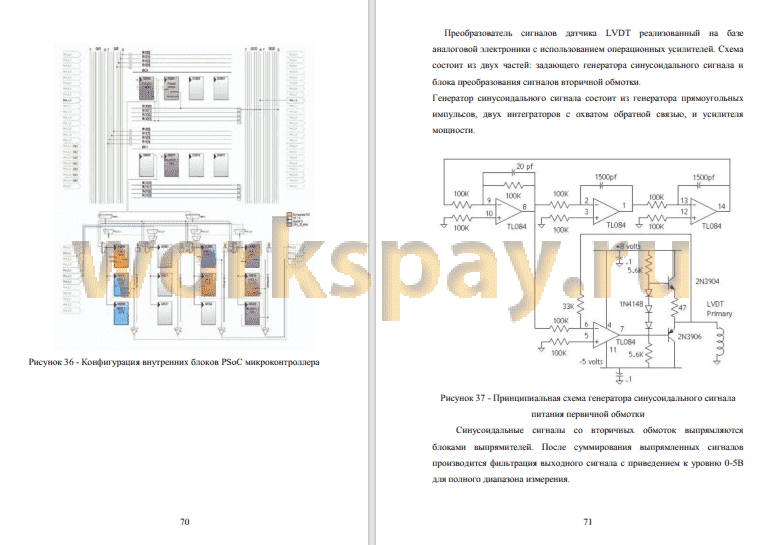
4.2 Преобразователь сигналов LVDT - датчика 66
4.3 Преобразователь тока питания катушки актуатора 73
4.4 Испытательный стенд гидроаппаратуры 79
Заключение 84
Список использованных источников
📖 Введение
Для достижения поставленной цели требуется решить следующие задачи:
1. Провести анализ конструкция пропорционального гидравлического распределителя прямого действия с линейным позиционным актуатором
2. Математическое моделирование режимов работы линейным актуатором с позиционным управлением
3. Разработать система измерения линейного положения актуатора повышенной точности
4. Разработать систему управления актуатором на базе современных микроконтроллеров
✅ Заключение
Система управления реализована на базе современного микроконтроллера с интеграцией цифровой и аналоговой части.
Основные научные и практические результаты, достигнутые в работе, заключаются в следующем:
1. В качестве объекта управления выделен механотронный модуль линейного актуатора соленоидного типа с интегрированным линейным датчиком перемещения на базе линейного измерительного дифференциального трансформатора.
2. Для повышения точности системы измерения датчика положения применен программный алгоритм коррекции выходного сигнала при юстировке
3. Проведено математическое моделирование в программе Simulink MATLAB соленоида актуатора где производится задание тока, подаваемого на катушку, моделируется механическое усилие сердечника соленойда с заданием значения присоединненой массы, упруго диссипативных свойств и задание усилия противодействующей пружины.
4. Электронная система управления линейным актуатором реализована на базе PSoC микроконтроллера, в котором цифровой микроконтроллер и набор перестраиваемых аналоговых блоков реализован в единой микросхеме. Данное техническое решение позволит расширить функциональные возможности системы управления в плане интерфейсов управления, а также снизить габариты системы управления, что важно для встраиваемых систем.
5. Для проверки статических и динамических режимов работы гидравлических регулирующих аппаратов разработан
испытательный стенд с использованием виртуальной панели управления на базе ПО LABVIEW.
📕 Список литературы
🖼 Скриншоты