Тема: ИЗМЕРЕНИЕ СЛАБОГО МАГНИТНОГО ПОЛЯ НА ОСНОВЕ ФЕРРОЗОНДОВОГО ДАТЧИКА
Характеристики работы
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
ГЛАВА 1. ДАТЧИКИ СЛАБЫХ МАГНИТНЫХ ПОЛЕЙ 12
1.1 Датчики для измерения магнитных полей 12
1.2 Магниторезистивные датчики 15
1.2.1 Магниторезисторы на эффекте Гаусса 16
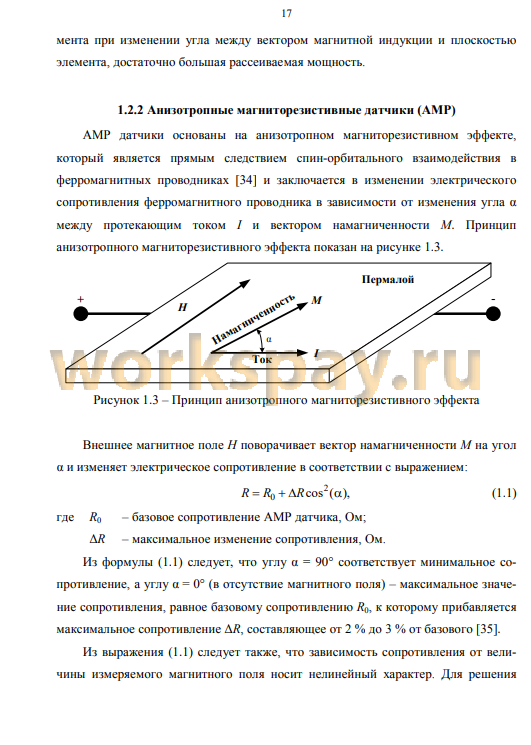
1.2.2 Анизотропные магниторезистивные датчики 17
1.2.3 Гигантские магниторезистивные датчики 19
1.2.4 Спин-туннельные магниторезистивные датчики 21
1.3 ЯМР датчики 22
1.3.1 Датчики с вынужденной ядерной прецессией 23
1.3.2 Датчики со свободной ядерной прецессией 24
1.3.3 Датчики с оптической накачкой 25
1.4 Сквиды 25
1.5 Феррозондовые преобразователи 29
1.6 Сравнительные характеристики датчиков магнитных полей 38
1.7 Выводы к главе 1 40
ГЛАВА 2. АНАЛИТИЧЕСКОЕ ОПИСАНИЕ ФЕРРОЗОНДОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ С УЧЕТОМ ФОРМЫ СИГНАЛА
ВОЗБУЖДЕНИЯ 42
2.1 Основные термины 42
2.2 Математическая модель феррозондового преобразователя 43
2.2.1 Одностержневой преобразователь 43
2.2.2 Дифференциальный преобразователь 46
2.3 Выбор формы сигнала возбуждения 50
2.4 Расчет выходной ЭДС феррозондового преобразователя 53
2.5 Выводы к главе 2 54
ГЛАВА 3. РАСЧЕТ И ИЗГОТОВЛЕНИЕ СИСТЕМЫ КАТУШЕК ДЛЯ
КАЛИБРОВКИ ДАТЧИКА МАГНИТНОГО ПОЛЯ 55
3.1 Средства калибровки феррозондовых датчиков 55
3.1.1 Создание магнитного поля с помощью соленоида 55
3.1.2 Создание магнитного поля с помощью аксиальной двухкатушечной
системы 57
3.1.3 Создание магнитного поля с помощью аксиальной трехкатушечной
системы 60
3.1.4 Создание магнитного поля с помощью аксиальной
четырехкатушечной системы 65
3.2 Расчет многокатушечной системы 68
3.3 Моделирование калибровочной системы методом конечных элементов ... 72
3.4 Изготовление и апробация калибровочной системы катушек 82
3.5 Выводы к главе 3 85
ГЛАВА 4. РАЗРАБОТКА И ИССЛЕДОВАНИЕ ФЕРРОЗОНДОВОГО
МАГНИТОМЕТРА 86
4.1 Исследование дифференциального феррозондового датчика 86
4.1.1 Определение частоты сигнала возбуждения 87
4.1.2 Исследование гармонического состава выходного сигнала при
синусоидальном сигнале возбуждения 88
4.1.3 Исследование гармонического состава выходного сигнала при
прямоугольном сигнале возбуждения 90
4.1.4 Проверка способа повышения чувствительности феррозондового
датчика 93
4.2 Устройство кондиционирования данных с феррозондового датчика 98
4.3 Исследование метрологических характеристик магнитометра 109
4.3.1 Определение погрешности коэффициента передачи устройства
кондиционирования 109
4.3.2 Определение погрешности измерения магнитной индукции 115
4.4 Выводы к главе 4 116
ЗАКЛЮЧЕНИЕ 118
Список используемой литературы 120
Приложение А. Акты внедрения результатов диссертационной работы 134
📖 Аннотация
📖 Введение
Измерение магнитной индукции как характеристики магнитного поля является одной из важнейших задач в области создания и обеспечения функционирования систем навигации, ориентации и стабилизации; экранирования квантовых компьютеров, магнитной томографии, дефектоскопии и неразрушающего контроля изделий, а также реализации систем безопасности и охраны различных объектов. Средства измерений магнитного поля высокой точности используются также при поиске и обнаружении магнитных аномалий в космосе, в воздушной, подводной, надводной и подземной средах, при геофизическом и геологическом мониторинге, измерении больших токов и т.д.
Магнитные поля обычно подразделяют на сверхсильные (свыше 100 Тл), сильные (от 4 до 100 Тл), средние (от 0,05 до 4 Тл), и слабые (менее 0,05 Тл). В зависимости от области применения магнитометра и величины измеряемого магнитного поля возникает проблема выбора того или иного первичного измерительного преобразователя магнитного поля (датчика магнитного поля).
Развитие современных мобильных робототехнических комплексов как наземного, так подводного и космического назначения требует опережающей разработки магнитометров высокого разрешения для измерения слабых магнитных полей и использования в составе систем навигации, ориентации и стабилизации. В связи с интенсивным освоением шельфа актуальной задачей является проблема измерения слабых магнитных полей при поиске и отслеживании магнитных аномалий, таких, как невзорвавшиеся авиабомбы и артиллерийские снаряды, мины, подводные нефте- и газопроводы, бронированные кабели и другие объекты. При этом поиск должен проходить в условиях воздействия, как нормального магнитного поля Земли, так и различного рода естественных магнитных аномалий.
Для измерения слабых постоянных и медленно изменяющихся магнитных полей в настоящее время применяются магниторезистивные преобразователи, преобразователи на основе ядерно-магнитного резонанса, сквиды и феррозондовые преобразователи. Благодаря компактности, невысокой стоимости, широкому рабочему температурному диапазону, низкому уровню шумов, возможности измерения направления магнитного поля феррозондовые преобразователи и магнитометры на их основе являются наиболее предпочтительными.
Одно из основных направлений совершенствования феррозондовых магнитометров является повышение чувствительности, которое может осуществляться за счет выбора оптимальных амплитуды, частоты, формы сигнала возбуждения и алгоритма обработки выходного сигнала датчика.
Традиционная аналитическая модель феррозонда предназначена для описания его работы только при возбуждении током синусоидальной формы, при этом используется аппроксимация средней кривой намагничивания сердечника укороченным полиномом третей степени, а анализ чувствительности проводится для второй гармоники, содержащейся в выходном сигнале. Это затрудняет анализ чувствительности датчика на любой из гармоник.
Целью диссертационной работы является разработка, исследование, аппаратно-программная реализация и экспериментальная апробация магнитометра на основе феррозондового датчика с повышенной чувствительностью для измерения слабых магнитных полей.
В соответствии с поставленной целью были сформулированы следующие задачи исследования:
1. Разработка аналитической модели дифференциального феррозондового преобразователя, учитывающей форму сигнала возбуждения и способ аппроксимации средней кривой намагничивания сердечника, обеспечивающей анализ чувствительности феррозонда на любой из гармоник.
2. Анализ работы феррозондовых преобразователей с учетом формы сигнала возбуждения и способа аппроксимации средней кривой намагничивания и поиск путей повышения чувствительности измерения магнитной индук-
ции.
3. Разработка, изготовление и апробация магнитометра на основе феррозондового датчика для измерения слабых магнитных полей с повышенной чувствительностью.
4. Разработка и изготовление источника (меры) магнитной индукции постоянного поля для калибровки магнитометра на основе феррозондового датчика.
Методы исследования. Теоретическая часть работы выполнена на основе методов теории электромагнитного поля, теории погрешностей, дифференциального и интегрального исчисления, математического моделирования. При расчетах и моделировании использовались программные пакеты Mathcad, Multisim, Statistica, Comsol и LabVIEW.
Достоверность полученных результатов диссертационной работы подтверждается совпадением с достаточной на практике точностью экспериментальных данных, полученных при апробации феррозондового магнитометра с применением эталонных средств измерений, с результатами моделирования и теоретических исследований. Экспериментальные исследования проводились в лабораторных и производственных условиях с использованием современных прецизионных средств измерений, прошедших периодическую поверку.
Научная новизна работы
1. Получены универсальные выражения для расчета ЭДС, наводимой в измерительной обмотке феррозонда, и его чувствительности для любой из гармонических составляющих выходного сигнала при сигнале возбуждения произвольной формы.
2. На основе математического анализа и моделирования в системе COMSOL неоднородности магнитного поля, создаваемого 2-, 3- и 4-катушечными системами известных типов, разработана и изготовлена 8-катушечная система радиусом R для калибровки и градуировки датчиков слабого магнитного поля, обеспечивающая неоднородность магнитного поля не более 0,1 % в цилиндрическом объеме в центре системы радиусом R/2.
3. Предложен и экспериментально проверен метод обработки выходного сигнала феррозондового датчика при возбуждении прямоугольным сигналом с синхронным детектированием выходной ЭДС на второй, четвертой и шестой гармониках и последующим суммированием результатов детектирования, обеспечивающий повышение чувствительности измерения магнитного поля на 40 %.
Практическая ценность работы. Разработанный в ходе диссертационных исследований магнитометр с повышенной чувствительностью может найти широкое применение для измерения слабых магнитных полей и использования в составе систем навигации, ориентации и стабилизации робототехнических комплексов как наземного, так подводного и космического назначения, в системах экранирования квантовых компьютеров, при поиске и обнаружении магнитных аномалий. Восьмикатушечная система может использоваться для калибровки и градуировки различных типов датчиков магнитного поля и магнитометров на их основе.
Реализация и внедрение результатов работы. Результаты исследований по теме диссертации использованы для выполнения при непосредственном участии автора следующих НИР:
• Грант ФЦП «Научные и научно-педагогические кадры инновационной России» на проведение исследований по теме «Система контроля магнитного окружения квантового процессора на основе феррозондового датчика сверхвысокого разрешения», 2010-2012 гг., госконтракт № 14.740.11.0950.
• Грант РФФИ по теме «Научные основы проектирования синхронных усилителей с дифференциальным входом для измерений малых отклонений физических величин на фоне большой синфазной помехи», 2015-2017 гг., госконтракт № 15-08-01007
• Совместный проект ВИУ ИК_118, 2014 Томского политехнического университета и Института проблем морских технологий Дальневосточного отделения Российской академии наук, г. Владивосток по теме «Телекоммуникационные системы мониторинга и управления для автономных подводных роботов».
Результаты работы используются в Научно-исследовательском институте автоматики и электромеханики ТУСУРа г. Томск при проектировании систем управления движителями обитаемых и необитаемых подводных аппаратов. Акт внедрения приложен к диссертационной работе.
Положения, выносимые на защиту
1. Предложенные на основе математического анализа дифференциальных феррозондовых преобразователей с разомкнутым сердечником при аппроксимации средней кривой намагничивания нечетными степенными полиномами обобщенные выражения позволяют рассчитать амплитуду любой из гармоник выходного напряжения и чувствительность феррозонда независимо от формы сигнала возбуждения.
2. Разработанная 8-катушечная система для калибровки датчиков слабого магнитного поля позволяет создавать магнитное поле в диапазоне от 0 до 100 мкТл с неоднородностью 0,1 % при токе питания от 0 до 200 мА.
3. Метод обработки выходного сигнала феррозондового датчика реализован при изготовлении и экспериментальной апробации магнитометра с повышенной чувствительностью, позволяющего проводить измерения магнитной индукции в диапазоне от 10 нТл до 100 мкТл с разрешающей способностью 10 нТл и относительной погрешностью не более 2 %.
Апробация результатов работы. Основные результаты диссертационной работы докладывались и обсуждались на следующих конференциях:
• III Университетская конференция студентов Элитного технического образования «Ресурсоэффективным технологиям - энергию и энтузиазм молодых», г. Томск, 2012 г.;
• XVIII Международная научно-практическая конференция студентов, аспирантов и молодых ученых «Современные техника и технологии СТТ 2012», г. Томск, 2012 г.;
• XIX Международная научно-практическая конференция студентов, аспирантов и молодых ученых «Современные техника и технологии СТТ 2013», г. Томск, 2013 г.;
• II Всероссийский форум школьников, студентов, аспирантов и молодых ученых с международным участием «Космическое приборостроение 2014» г. Томск, 2014 г.;
• Международная научно-техническая конференция Dynamics of Systems, Mechanisms and Machines (DYNAMICS-2014), г. Омск, 2014 г.;
• XI Международная IEEE Сибирская конференция по управлению и связи (SIBCON-2015), г. Омск, 2015 г.;
• XVI Международная научно-техническая конференция «Измерение, контроль, автоматизация ИКА 2015», г. Барнаул, 2015 г.;
• XXI Международный конгресс IMEKO, г. Прага, Чешская Республика Чехия, 2015 г.;
Публикации Основные результаты исследований отражены в 12 публикациях, включая три статьи в ведущих научных журналах и изданиях, рекомендуемых ВАК, из них одна статья в зарубежном журнале, включенном в БД Scopus; девять статей в сборниках трудов международных и российских конференций.
Диссертационная работа состоит из четырех глав.
В первой главе представлен аналитический обзор современных датчиков для измерения слабых постоянных и медленно изменяющихся магнитных полей. Выделяются основные характеристики датчиков магнитного поля. Приводится описание магниторезистивных преобразователей, преобразователей на основе ядерно-магнитного резонанса и сквидов. Особое внимание уделено аналитическому обзору феррозондовым преобразователем.
Во второй главе рассматриваются вопросы повышения чувствительности феррозондовых преобразователей. Проводится математический анализ работы дифференциальных феррозондовых преобразователей с разомкнутым сердечником в зависимости от формы сигнала возбуждения. Предлагается обобщенная математическая модель феррозондового преобразователя для расчета ЭДС в измерительной обмотке феррозонда и чувствительности на любой из гармоник независимо от формы сигнала возбуждения. Предлагается процедура обработки сигналов с феррозондового датчика для повышения чувствительности измерения магнитной индукции.
В третьей главе рассматриваются средства калибровки и градуировки датчиков слабых магнитных полей и магнитометров на их основе. Проводится анализ неоднородности магнитного поля создаваемого катушками Г ельмгольца, трех- и четырехкатушечными системами. Приводится описание процедуры расчета, практическая реализация и экспериментальные исследования восьмикатушечной системы для калибровки датчиков слабого магнитного поля с повышенной однородностью магнитного поля на расстояние половины радиуса от центра системы.
В четвертой главе рассматриваются вопросы экспериментального исследования процедуры обработки сигналов с феррозондового датчика, предложенной во второй главе. Проводится исследование чувствительности типового дифференциального феррозондового датчика на второй, четвертой и шестой гармониках при возбуждении сигналами синусоидальной и прямоугольной форм. Приводится описание практической реализации устройства кондиционирования сигналов с феррозондового датчика и оценивается погрешность прототипа магнитометра.
✅ Заключение
2. Разработана, изготовлена и экспериментально апробирована калибровочная 8-катушечная система для создания магнитного поля с неоднородностью не хуже 0,1 % на расстоянии половины радиуса от геометрического центра системы при токе питания от 0 до 200 мА.
3. Предложен и экспериментально проверен метод обработки сигналов с феррозондового датчика за счет измерения амплитуд второй, четвертой и шестой гармоник с последующим суммированием результатов измерений, обеспечивающая повышение чувствительности измерения магнитного поля на 40 %.
4. Разработан, изготовлен и апробирован магнитометр на основе феррозондового датчика для измерения слабых магнитных полей с повышенной чувствительностью, позволяющий проводить измерения магнитной индукции в диапазоне от 10 нТл до 100 мкТл с разрешающей способностью 10 нТл и относительной погрешностью не более 2 %.
5. Разработанные универсальные выражения для расчета ЭДС в измерительной обмотке феррозонда и чувствительности на любой из гармоник независимо от формы сигнала возбуждения, магнитометр и калибровочная восьмикатушечная система были использованы при выполнении НИР по темам: «Система контроля магнитного окружения квантового процессора на основе феррозондового датчика сверхвысокого разрешения»; «Научные основы проектирования синхронных усилителей с дифференциальным входом для измерений малых отклонений физических величин на фоне большой синфазной помехи», «Телекоммуникационные системы мониторинга и управления для автономных подводных роботов».
6. Разработанный магнитометр и калибровочная восьмикатушечная система используются в рамках научно-технического сотрудничества Научноисследовательского института автоматики и электромеханики ТУСУРа г. Томск и Томского политехнического университета при проектировании систем управления движителями обитаемых и необитаемых подводных аппаратов и в учебном процессе на кафедре компьютерных измерительных систем и метрологии Томского политехнического университета, что подтверждено актами внедрения результатов диссертационной работы.
📕 Список литературы
🖼 Скриншоты