Тема: РАЗРАБОТКА НАБЛЮДАТЕЛЯ СОСТОЯНИЯ ДЛЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ПОВЫШЕННОЙ ПАРАМЕТРИЧЕСКОЙ РОБАСТНОСТЬЮ
Характеристики работы
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
1. КРИТИЧЕСКИЙ АНАЛИЗ СОВРЕМЕННОГО УРОВНЯ
РАЗРАБОТОК В ОБЛАСТИ ОЦЕНИВАНИЯ ПЕРЕМЕННЫХ СОСТОЯНИЯ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ 9
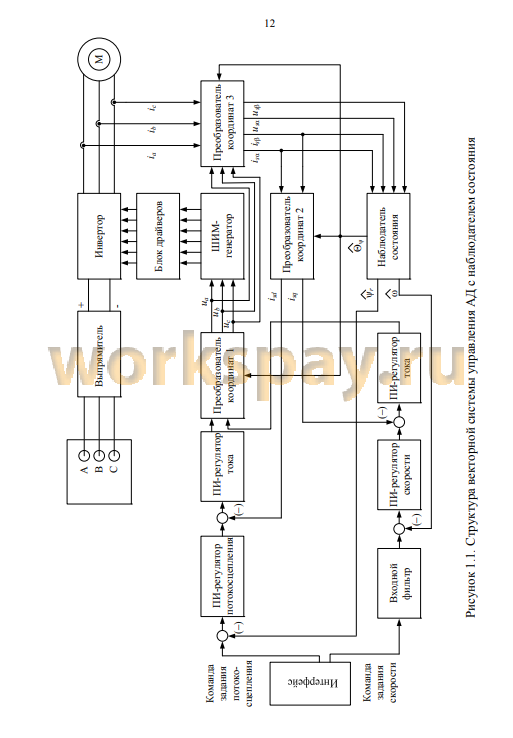
1.1. Подход к построению систем асинхронных электроприводов с
наблюдателями состояния 9
1.2. Сравнительный анализ преимуществ и недостатков известных
наблюдателей состояния асинхронных электродвигателей 13
1.3. Выводы по первой главе 16
2. СТРУКТУРНЫЙ СИНТЕЗ НАБЛЮДАТЕЛЯ СОСТОЯНИЯ
АСИНХРОННЫХ ДВИГАТЕЛЕЙ,
МАЛОЧУВСТВИТЕЛЬНОГО К ИЗМЕНЕНИЮ ВНУТРЕННИХ ПАРАМЕТРОВ 17
2.1 Общий подход к построению наблюдателей состояния динамических объектов 17
2.2. Математическое описание асинхронного двигателя в форме
пространства состояний, удобной для синтеза
наблюдателя 20
2.3. Разработка структуры наблюдателя состояния асинхронного
двигателя, малочувствительного к изменению внутренних параметров 27
2.4. Имитационное моделирование работы асинхронного
электропривода с разработанным наблюдателем 37
2.5. Выводы по второй главе 43
3 ВЫЯВЛЕНИЕ ПРЕИМУЩЕСТВ ПРИМЕНЕНИЯ
РАЗРАБОТАННОГО НАБЛЮДАТЕЛЯ В УСЛОВИЯХ ПАРАМЕТРИЧЕСКИХ ВОЗМУЩЕНИЙ 44
3.1. Введение понятия интегрального критерия параметрической
робастности асинхронного электропривода с наблюдателем состояния 44
3.2. Исследование параметрической робастности асинхронного
электропривода с помощью предложенного интегрального критерия 46
3.3. Исследование изменения статической ошибки асинхронного
электропривода при вариации граничных отклонений активных сопротивлений обмоток электродвигателя 51
3.4. Выводы по третьей главе 54
4 ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С НАБЛЮДАТЕЛЕМ СОСТОЯНИЯ 55
4.1. Идентификация скорости вращения вала асинхронного двигателя при питании от промышленной сети переменного тока с несимметричностью и несинусоидальностью фазных напряжений 55
4.2. Идентификация скорости вращения вала и электромагнитного
момента асинхронного двигателя при питании от преобразователя частоты 64
4.3. Экспериментальное исследование в режиме реального времени
параметрической робастности разработанного наблюдателя 68
4.4. Отработка наблюдателем ненулевых начальных условий в
режиме реального времени 78
4.5. Выводы по четвертой главе 80
ЗАКЛЮЧЕНИЕ 82
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 83
ПРИЛОЖЕНИЯ 94
ПРИЛОЖЕНИЕ А. Методика расчета параметров схемы замещения 94
асинхронного электродвигателя АИР90Е4
ПРИЛОЖЕНИЕ Б. Имитационные модели асинхронного
электропривода с наблюдателем состояния в программной среде
MATLAB Simulink 97
ПРИЛОЖЕНИЕ В. Текст программного кода разработанного наблюдателя в среде MexBIOS Development Studio 102
ПРИЛОЖЕНИЕ Г. Акты внедрения результатов диссертационной работы 103
📖 Аннотация
📖 Введение
Параметры современных высокопроизводительных сигнальных процессоров позволяют применять в составе системы управления АЭП устройства косвенного оценивания координат - наблюдатели состояния, что дает возможность отказаться от ряда датчиков, расположенных вне шкафа управления электропривода. Наиболее полно преимущества использования асинхронных электроприводов с наблюдателями состояния реализуются в случаях, когда установка датчиков переменных АД нецелесообразна в связи с условиями эксплуатации электропривода, например, при работе механизмов во взрыво- и пожароопасных помещениях, химически агрессивных и радиоактивных средах, а также в условиях вибрации и значительных ударных механических нагрузок.
К одной из основных проблем при реализации систем АЭП без датчиков регулируемых координат следует отнести повышенную чувствительность электропривода к изменению его внутренних параметров в процессе эксплуатации, следовательно, разрабатываемый наблюдатель состояния двигателя должен обеспечивать параметрическую робастность асинхронного электропривода - грубость в отношении параметрических возмущений.
Значительный вклад в разработку, изучение и совершенствование асинхронных электроприводов с наблюдателями состояния внесли следующие российские и зарубежные ученые: В.Г. Каширских, В.В. Панкратов, А.Б. Виноградов, И.Я. Браславский, А.М. Зюзев, Bimal K. Bose и др.
В настоящее время в указанной области научных исследований преобладает концепция разработки наблюдателя для решения узкого класса объектно-ориентированных задач, однако не уделялось должного внимания созданию наблюдателя полного порядка, способного обеспечить восстановление сигналов обратных связей для большинства основных методов управления асинхронным двигателем в условиях нечувствительности к параметрическим возмущениям в АЭП. Поэтому решение задачи по разработке такого универсального наблюдателя представляет научный и практический интерес, следовательно, является своевременной и актуальной.
Объект исследований: асинхронный электропривод с наблюдателем состояния.
Предмет исследований: методы синтеза наблюдателя состояния, нечувствительного к параметрическим возмущениям в асинхронном электроприводе.
Цель работы: разработка и исследование наблюдателя полного вектора состояния для асинхронного электропривода с повышенной параметрической робастностью.
Для достижения цели необходимо было решить следующие задачи:
1. Выполнить сравнительный анализ существующих наблюдателей состояния асинхронного электродвигателя, выявить их основные достоинства и недостатки, наметить пути достижения поставленной цели.
2. Провести структурный и параметрический синтез наблюдателя для асинхронного двигателя с возможностью оценки полного вектора состояния, а также электромагнитного и нагрузочного моментов.
3. Разработать интегральный критерий параметрической робастности асинхронного электропривода, замкнутого по выходным сигналам наблюдателя состояния. Предложенный интегральный критерий должен позволять оценить степень расхождения процессов в электроприводе при нормальных условиях от процессов, происходящих при изменении внутренних параметров.
4. Экспериментально подтвердить работоспособность предложенного наблюдателя состояния асинхронного электродвигателя.
Методы исследований. Для решения поставленных задач использовались методы теории автоматического управления, уравнения обобщенной электрической машины, численные методы решения систем обыкновенных дифференциальных уравнений.
Достоверность и обоснованность полученных результатов диссертационной работы подтверждаются корректностью принятых допущений при составлении математических моделей, результатами имитационного моделирования в программной среде MATLAB Simulink, а также экспериментальными исследованиями на лабораторных стендах.
Научная новизна диссертационной работы заключается в следующем:
1. Разработана структура наблюдателя асинхронного двигателя, отличающаяся от существующих наличием сигнала оценки момента сопротивления, полученного путем пропорционально-интегральной отработки векторного произведения векторов оценки потокосцепления ротора и невязки между измеренным и оцененным токами статора, что позволяет повысить параметрическую робастность асинхронного электропривода.
2. Предложен интегральный критерий параметрической робастности асинхронного электропривода с наблюдателем состояния, позволяющий оценить степень расхождения процессов в электроприводе, происходящих при нормальных условиях, от процессов при флуктуации внутренних параметров.
Практическая ценность работы:
1. В программной среде MATLAB Simulink создана имитационная модель асинхронного электропривода с разработанным наблюдателем состояния, позволяющая на этапе разработки учесть особенности электромеханической системы и тем самым сократить срок проектирования электротехнического комплекса.
2. Разработан компонент библиотеки в визуальной среде разработки и моделирования встроенного программного обеспечения систем управления электродвигателями MexBIOS Development Studio, позволяющий снизить временные затраты на разработку и ввод в эксплуатацию новых асинхронных электроприводов производственных механизмов с наблюдателями состояния.
Положения, выносимые на защиту:
1. Структура наблюдателя полного вектора состояния, электромагнитного момента и момента сопротивления на валу асинхронного электродвигателя.
2. Методика расчета интегрального критерия параметрической робастности асинхронного электропривода с наблюдателем состояния.
3. Результаты исследования параметрической робастности асинхронного электропривода с разработанным наблюдателем.
4. Результаты экспериментальных исследований.
Апробация работы. Основные положения диссертационной работы докладывались и обсуждались на IV Международной научно-технической конференции «Электромеханические преобразователи энергии» (г. Томск, 2009 г.); на Отраслевых научно-технических конференциях «Технология и автоматизация атомной энергетики и промышленности» ТААЭП-2010, ТААЭП-2011 (г. Северск, 2010, 2011 гг.); на Всероссийских научных конференциях молодых ученых «Наука. Технологии. Инновации» НТИ-2010, НТИ-2011, НТИ-2012 (г.Новосибирск, 2010-2012 гг.); на XVII Международной научно-практической конференции студентов и молодых ученых «Современные техника и технологии» СТТ-2011 (г. Томск, 2011 г.).
Реализация результатов работы. Результаты исследований внедрены в ООО НПФ «Мехатроника-Про», а также использованы в проекте- победителе №02/09-2012 «Создание лабораторного комплекса по разработке современных интеллектуальных средств динамической идентификации, эксплуатационной диагностики внутренних повреждений, отказоустойчивой эксплуатации синхронных генераторов и электрических машин электроприводов собственных нужд тепловых электростанций» по результатам III Межвузовского конкурса исследовательских проектов по направлению: Традиционная и атомная энергетика, альтернативные технологии производства энергии.
Публикации. По теме диссертационной работы опубликовано 13 работ, в том числе 5 статей в рецензируемых научных изданиях и журналах, рекомендованных ВАК РФ для опубликования основных научных результатов диссертаций, 1 патент РФ на изобретение, 7 тезисов в материалах научных конференций.
Структура и объем диссертации. Диссертационная работа состоит из введения, четырех глав, заключения, списка литературы, приложений, выполнена на 106 страницах машинописного текста, содержит 62 рисунка, 11 таблиц. Список использованной литературы состоит из 86 наименований. Приложения приведены на 13 страницах.
✅ Заключение
2. Предложенная методика настройки параметров наблюдателя доказала возможность применения его для асинхронных электроприводов различной мощности.
3. В качестве квалиметрического подхода к оценке степени чувствительности асинхронного электропривода с наблюдателем состояния к неконтролируемым параметрическим возмущениям предложен интегральный критерий параметрической робастности.
4. Исследование параметрической робастности выявило, что асинхронный электропривод с разработанным наблюдателем имеет наименьшее значение предложенного интегрального критерия /=13,9% при максимальном отклонении активных сопротивлений на 20% от номинальных значений, чем известные аналоги - расширенный фильтр Калмана (1=16,7%) и наблюдатель полного порядка (1=14,051%), что доказывает более высокую степень параметрической робастности разработанного наблюдателя.
5. Экспериментально подтверждены работоспособность разработанного наблюдателя в условиях несимметричности и несинусоидальности входных сигналов, а также его высокая параметрическая робастность при изменении активных сопротивлений обмоток в пределах от 0,4Ян до 1,61% в диапазоне регулирования скорости вала двигателя 1:100.
📕 Список литературы
🖼 Скриншоты