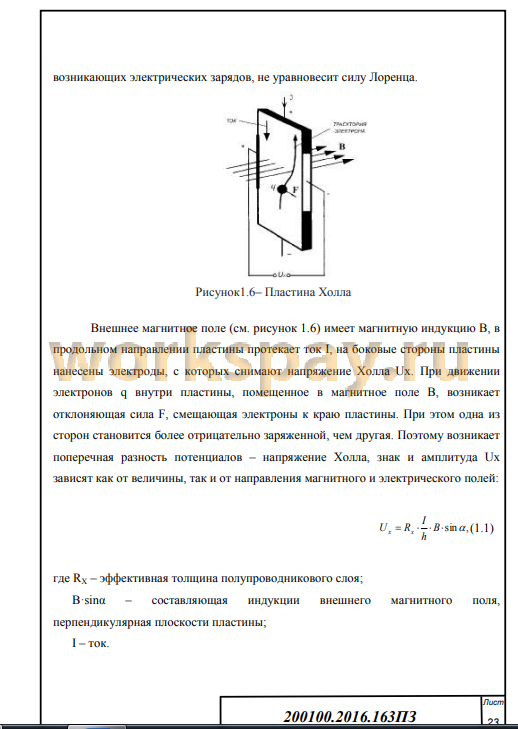
Тема: Амплитудный цифровой преобразователь угла с магнитным энкодером
Характеристики работы
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
ВВЕДЕНИЕ 9
1 АНАЛИТИЧЕСКИЙ ОБЗОР
1.1 Основные характеристики цифровых измерительных устройств 11
1.2 Первичные измерительные преобразователи перемещения:
магнитные энкодеры 14
1.3 Перспективные разработки в области цифрового измерения
перемещения 39
2 ПРОЕКТИРОВАНИЕ АМПЛИТУДНОГО ЦИФРОВОГО
ПРЕОБРАЗОВАТЕЛЯ ПЕРЕМЕЩЕНИЯ
2.1 Функциональная схема амплитудного цифрового преобразователя
перемещения 47
2.2 Построение принципиальной схемы цифрового преобразователя
перемещения 60
3 ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ЦИФРОВОГО
ПРЕОБРАЗОВАТЕЛЯ ПЕРЕМЕЩЕНИЯ
3.1 Схема алгоритма программы контроллера 65
3.2 Описание работы 69
4 МЕТРОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ЦИФРОВОГО
ПРЕОБРАЗОВАТЕЛЯ ПЕРЕМЕЩЕНИЯ
4.1 Расчет полной погрешности ЦПП 71
4.2 Разработка методики выполнения измерений 77
4.3 Разработка методики поверки ЦПП 83
5 ОРГАНИЗАЦИОННО-ЭКОНОМИЧЕСКИЙ РАЗДЕЛ
5.1 Сетевое планирование 92
5.2 Построение сетевого графика 92
5.3 Расчет параметров событий сетевого графика 94
5.4 Расчет параметров работ сетевого графика 96
6 БЕЗОПАСНОСТЬ ЖИЗНЕДЕЯТЕЛЬНОСТИ
6.1 Анализ опасных и вредных производственных факторов 104
6.2 Анализ условий эксплуатации 106
6.3 Соответствие требованиям безопасности 106
6.4 Эргономика 118
ЗАКЛЮЧЕНИЕ 109
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 111
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ А. ПРИНЦИПИАЛЬНАЯ СХЕМА ПРОЕКТИРУЕМОГО
УСТРОЙСТВА 116
📖 Аннотация
📖 Введение
На данный момент, робототехника внесена в список новых перспективных технологий, в соответствии с указом Президента РФ от 07.07.2011 № 899 «Об утверждении приоритетных направлений развития науки, технологий и техники в Российской Федерации и перечня критических технологий Российской Федерации», который содержит некоторые из самых выдающихся текущих событий, достижений и инноваций в различных областях современной технологии и находятся в стадии интенсивного развития, как в России, так и за рубежом. Развитие робототехники потребовало совершенствования электромеханики на основе широкого внедрения компьютерной техники, результатом чего и стало формирование мехатроники, предназначенной для управления производственными процессами практически во всех отраслях производства.
Актуальным направлением развития электромехатронныхпреобразователей (далее - ЭМТП) является совершенствование их информационно-измерительной подсистемы, а именно переход от кинестетических первичных синусно¬косинусных датчиков угла (далее - СКДУ) к генераторным синусно-косинусным магнитным энкодерам (далее - СКМЭ), использующим известный эффект Холла или открытый в 1988 г. эффект гигантского магниторезонанса (далее - ГМР).
Магниторезистивные датчики используются для измерения скорости вращения, положения, для бесконтактного измерения тока, для исследования и контроля различных физиологических процессов и многих других. Поэтому целесообразно провести анализ их использования, как первичных элементов информационно-измерительных систем различного назначения. В этом отношении большими возможностями обладают датчики магнитного поля на основе ГМР. Компания InfineonTechnologies производит датчики типа TLE5012B,
определяющий угол в диапазоне 360° по изменению направления магнитного поля. Измерение производится на основе встроенных ГМР элементов, соединенных в мостовую схему, сопротивление которых меняется в зависимости от направления магнитного поля. К существенным достоинствам варианта информационного обеспечения ЭМПТ на основе ГМР относится простота реализации на его основе амплитудного многокомпонентного преобразователя, для которого составляющая ускорения перемещения может быть получена в микроконтроллере дифференцированием цифрового эквивалента скорости. Используя современные магниторезистивные датчики в совокупности с различными алгоритмами обработки информации, возможно проектирование современных
высокочувствительных, интегральных и помехоустойчивых измерительных систем, необходимых для контроля и управления технологическими процессами.
Целью выпускной квалификационной работы является повышение эффективности цифровых преобразователей линейных и угловых перемещений путем внедрения в их информационную подсистему новейших нанотехнологических магнитных сенсоров перемещений.
Для достижения цели выпускной квалификационной работы необходимо решить следующие задачи:
1. Провести аналитический обзор: первичных измерительных
преобразователей перемещения, перспективных разработок в данной области.
2. Разработать функциональную схему цифрового преобразователя угла.
3. Построить принципиальную электрическую схему преобразователя угла.
4. Разработать программное обеспечение цифрового преобразователя перемещения.
5. Разработать метрологическое обеспечение цифрового преобразователя перемещения.
✅ Заключение
В ходе выполнения выпускной квалификационной работы были рассмотрены первичные преобразователи перемещения: магнитные энкодеры, амплитудные следящие ЦПУ, базирующиеся на традиционной и самоорганизующейся структурах. В результате полученная функциональная схема позволила увеличить информационную емкость и обеспечить возможность компенсации погрешностей всего ЦПУ.
Повышение эффективности измерения составляющих перемещения достигается совершенствованием не только структурного обеспечения измерительной системы, на него так же влияют программное и информационное обеспечение. Использование новейших разработок в области информационного обеспечения электромехатронных преобразователей перемещения актуально для управления производственными процессами практически во всех отраслях производства.
В соответствии с физическим принципом, положенным в основу преобразования информации, различают следующие основные типы первичных преобразователей: энкодеры (оптический, абсолютный, магнитный);
преобразователи Холла; СКВТ; первичные преобразователи на основе ГМР. В работе впервые предложена реализация информационного обеспечения ЦПУ, основанного на ГМР.
В ходе выполнения выпускной квалификационной работы построена структурная схема амплитудного цифрового преобразователя. Осуществлен выбор его аппаратного обеспечения. Разработана схема электрическая принципиальная проектируемого устройства с первичным преобразователем на основе ГМР-
Лист эффекта. Разработана схема алгоритма выполнения микропрограммы микроконтроллера для вычисления значений составляющих перемещения.
За счет внедрения программной и аппаратной составляющих нового поколения, наша информационно-измерительная система стала обладать рядом достоинств:
• Высокая точность и высокое быстродействие.
• Низкая себестоимость.
• Отсутствие редуктора (бесконтактная работа).
• Слабое влияние температуры.
• Широкий диапазон рабочих температур (-40..+150).
• Ультранизкое энергопотребление.
• Работа от батареи.
📕 Список литературы
🖼 Скриншоты