Тема: Разработка модели управления кибер-физической системы подвижного морского объекта
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
0.1. Основные тенденции технико-технологического развития общества и их влияние на прогресс 3
0.2. Постановка задачи на исследование в целом 5
Глава 1. Описание объекта исследований 7
1.1. Краткое описание автоматизированных систем управления курсом и
траектории судна 7
1.1 Автоматизированные системы управления курсом и траектории судна. 8
1.1.1 Общая характеристика 8
1.1.2 Удаленный контроль и управление 11
1.2.1. Анализ уязвимостей и факторов, воздействующих на датчики
контроля и защиты в системе автопилота 12
Глава 2. Разработка модели управления процессами обеспечения безопасности и управлением объекта «автоматизированных систем управления курсом и траектории судна» 17
2.1. Общий подход к разработке модели обеспечения безопасности для
объекта «автоматизированных систем управления курсом и траектории судна» 17
2.1. Выбор и обоснование основных соотношений модели обеспечения безопасности 23
2.1. Механизмы связи элементов модели с показателем уровня
безопасности 28
2.2. Анализ возможностей модели для обеспечения безопасности 32
2.3. Разработка технологии обеспечения безопасности объекта
«Автопилот» Общий подход к разработке технологии обеспечения безопасности 33
Разработка сетевой модели образования угрозы 35
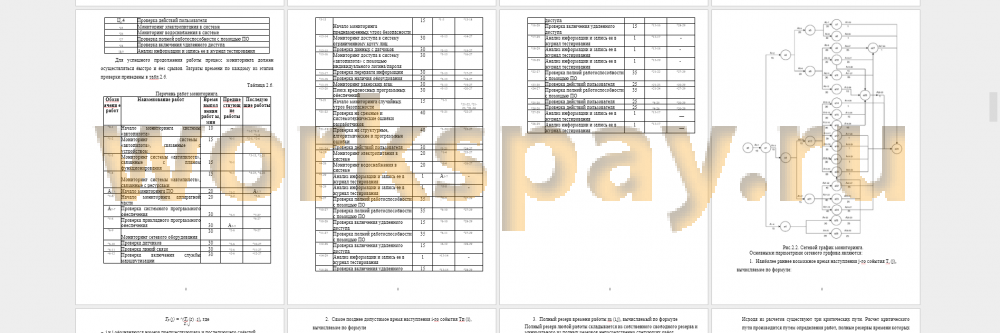
Сетевая модель мониторинга угрозы 40
Сетевая модель устранения проблемы 48
Выводы по Главе 2 58
Глава 3. Выбор и обоснование автоматизированной системы управления курсом и траектории судна 60
3.1 Задачи, возлагаемые на автопилот 60
3.1. Выбор и обоснование выбранного «автопилота» 71
Глава 4. Технико-экономическое обоснование применения требований к комплексу командных приборов 76
4.1 Описание типового сценария использования автоматизированной
системы управления курсом и траекторией судна 76
4.2 Определение затрат на установку аппаратного обеспечения,
соответствующего требованиям 77
4.3 Расчет затрат при столкновении с любым объектом 78
4.4. Технико-экономическое обоснование использования приборов в соответствии с выдвинутыми требованиями 81
Выводы к главе 4 82
ЗАКЛЮЧЕНИЕ 83
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 85
📖 Введение
Киберфизические системы (КФС) - это интегрированные системы, в которых вычислительные алгоритмы и физические процессы взаимодействуют и взаимодействуют друг с другом для достижения определенных целей. КФС объединяют в себе компоненты вычислительной системы (компьютеры, сенсоры, актуаторы) и физической системы (физические объекты, такие как роботы, автомобили, промышленное оборудование).
КФС используются во многих областях, таких как автоматизация производства, управление транспортными системами, робототехника, медицинская техника и другие. Они обеспечивают возможность взаимодействия между физическими и вычислительными компонентами, что позволяет создавать более эффективные и интеллектуальные системы.
Примеры киберфизических систем включают автономные автомобили, где вычислительные алгоритмы управляют движением автомобиля на основе данных с сенсоров и информации о дорожной ситуации; системы умного дома, где сенсоры и актуаторы интегрированы с системой управления для автоматизации различных задач в доме; или автоматизированные производственные системы, где роботы и другое оборудование контролируются вычислительными алгоритмами для оптимизации производственных процессов.
Кибер-физические системы (КФС) играют ключевую роль в развитии таких передовых технологий, как Интернет вещей (IoT), автономные системы и промышленная автоматизация. Это слияние компьютерных наук, инженерии систем и физики существенно влияет на нашу жизнь и упрощает ее.
На сегодняшний день количество устройств, подключенных к Интернету, уже превышает население планеты, и к 2025 году ожидается, что это число превысит 100 миллиардов. Многие из этих устройств являются КФС, которые управляют автомобилями, самолетами, приборами, электрическими сетями, инфраструктурными системами и другими объектами, такими как трубопроводы и торговые сети.
...
✅ Заключение
Первая проблема решается через применение синтеза - закона сохранения целостности объекта (ЗСЦО). ЗСЦО обеспечивает достижение цели функционирования систем обеспечения безопасности путем обеспечения устойчивой и объективной связи между свойствами объекта и его действиями при фиксированном предназначении.
Вторая проблема связана с функционированием систем обеспечения безопасности на основе моделей. Для успешного выполнения этой задачи необходимо умение синтезировать адекватные модели. Цель функционирования систем искусственного интеллекта достигается только при наличии правильно построенной системы и соответствующей модели. В настоящее время отсутствует широко распространенный подход к функционированию систем обеспечения безопасности, основанный на рассмотрении ЗСЦО как условия существования. В данной работе структура системы обеспечения безопасности построена на основе ЗСЦО, что подтверждает ее целесообразность. Модель функционирования систем обеспечения безопасности основана на системной интеграции трех процессов: формирование проблемы, распознавание проблемы и устранение проблемы. Уровень функционирования систем обеспечения безопасности оценивается по вероятности обнаружения и устранения каждой проблемы.
Таким образом, разработанная модель управления кибер-физической системы морского подвижного объекта представляет собой значимый шаг в области функционирования систем обеспечения безопасности, где применение ЗСЦО и адекватных моделей играют важную роль в достижении целей и обеспечении надежности системы
📕 Список литературы
🖼 Скриншоты