Тема: Разработка модели управления группой подвижных подводных объектов
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
ГЛАВА 1. АНАЛИЗ ПРЕДМЕТНОЙ ОБЛАСТИ 6
1.1 Краткое описание подводных аппаратов 6
1.2 Классификация подводных необитаемых аппаратов 8
1.3 Задачи, реализуемые группами подвижных подводных объектов10
1.4 Обзор подходов к управлению группами подвижных подводных
объектов 12
ГЛАВА 2. ОПИСАНИЕ ПРОЕКТНОЙ ЧАСТИ 21
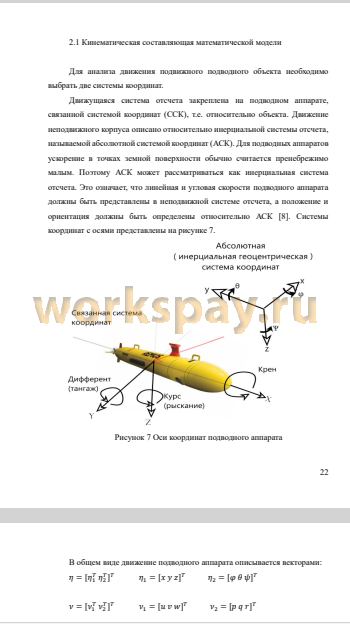
2.1 Кинематическая составляющая математической модели 22
2.2 Динамическая составляющая математической модели 24
2.3 Описание регулировки степени тангажа и глубины погружения 27
2.4 Описание модели обхода препятствий 31
ГЛАВА 3 РАЗРАБОТКА МОДЕЛИ УПРАВЛЕНИЯ ГРУППОЙ
ПОДВОДНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ 36
3.1 Создание модели устройства регулировки тангажа и глубины
погружения 38
3.2 Управление группой подвижных подводных объектов по подходу
«лидер-ведомый» на плоскости 43
3.3 Управление группой подвижных подводных объектов по подходу
«лидер-ведомый» в трехмерном пространстве 48
3.4 Преодоление препятствий 52
ЗАКЛЮЧЕНИЕ 56
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 57
📖 Введение
С другой стороны, отдельный робот, каким бы интеллектуальным он ни был, имеет относительно небольшие возможности для выполнения задач (небольшой радиус действия, ограниченные бортовые источники питания, небольшое количество функций, которые он может выполнять, ограниченный набор исполнительных механизмов, возможность выполнения конкретной задачи при работе в экстремальных условиях (маловероятно), понятно, что они могут быть использованы только для решения конкретных задач или выполнения относительно простых операций,
Очевидным решением указанной проблемы является объединение нескольких роботов в одну группу.
Преимуществами использования роботов в группах являются большой радиус действия, достигаемый за счет распределения роботов по всей рабочей зоне, и более широкий спектр функций, достигаемый за счет размещения отдельных исполнительных устройств на каждом роботе, и, наконец, более высокая вероятность выполнения работы за счет возможности перераспределения целей между роботами в группе в случае отказа некоторых роботов...
✅ Заключение
- изучение современного состояния области исследования;
- анализ существующих моделей и подходов;
- разработка модели устройства управления тангажом и глубиной погружения;
- разработка модели и демонстрация полученных результатов.
Поставленные задачи в данной работе были выполнены в полном объеме, однако дальнейшие исследования в данной теме должны быть продолжены по причине научной новизны, теоретической и практической значимости.
📕 Список литературы
🖼 Скриншоты