Тема: РАЗРАБОТКА УЧЕБНОГО ПОЛИГОНА ДЛЯ РОБОТА-МАНИПУЛЯТОРА DOBOT MAGICIAN
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
Глава 1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ СОЗДАНИЯ УЧЕБНОГО ПОЛИГОНА ДЛЯ РОБОТА-МАНИПУЛЯТОРА DOBOT MAGICIAN 6
1.1. Понятия робота и робототехники 6
1.2. Обзор робота-манипулятора DOBOT Magician 10
1.3. Обучающие полигоны и их роль в образовании 16
Глава 2. РАЗРАБОТКА УЧЕБНОГО ПОЛИГОНА ДЛЯ РОБОТА-МАНИПУЛЯТОРА DOBOT MAGICIAN 25
2.1. Учебные задачи манипулирования объектами в контексте возможностей DOBOT Magician 25
2.2. Проектирование учебного полигона 29
Вывод по второй главе 34
ЗАКЛЮЧЕНИЕ 35
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 37
📖 Введение
В настоящее время массово производятся роботы, доступные для школ, они обладают широкими возможностями. Одним из таких популярных роботов является робот-манипулятор DOBOT Magician. DOBOT имеет возможность программирования методом обучения, что делает процесс работы с ним более интуитивным и эффективным.
Однако возникает проблема: после перемещения площадки, на которой проходила работа, робот не способен продолжить свою деятельность из-за изменения местоположения точки начала координат и/или ориентации координатных осей, относительно которых происходило обучение.
Возникает необходимость в относительно точном позиционировании объектов на площадке, чтобы обеспечить бесперебойную и эффективную работу робота. Это требует разработки специального учебного полигона, который позволит точно определять и устанавливать позиции объектов на площадке для дальнейшей работы робота без сбоев.
Учебный полигон для робота-манипулятора представляет собой практическую среду, где пользователи смогут изучать основы программирования, управления и взаимодействия с роботом, это позволит им приобрести необходимые навыки для работы в области робототехники.
Создание учебного полигона для робота-манипулятора DOBOT Magician является инновационным подходом к обучению в области робототехники. Создание полигона позволит повысить качество образования и подготовить специалистов, готовых к работе с передовыми технологиями.
Современное общество ставит перед собой задачу развития высокотехнологичных отраслей, включая робототехнику. Создание учебного полигона для робота-манипулятора DOBOT соответствует требованиям общества к подготовке специалистов, способных работать с передовыми технологиями. Государственные программы развития образования и науки также поддерживают инициативы по внедрению инновационных методов обучения, включая работу с роботами.
Развитие отрасли информационных технологий в Российской Федерации осуществляется в соответствии с «Стратегией развития отрасли информационных технологий в Российской Федерации на 2014 - 2020 годы и на перспективу до 2025 года», утвержденной распоряжением Правительства РФ от 1 ноября 2013 года № 2036-р.
Основные задачи по развитию отрасли информационных технологий России: повышение грамотности населения в области информационных технологий; дальнейшая глубокая информатизация важнейших отраслей экономики России, в том числе государственного сектора. Разработка учебного полигона способствует реализации этих требований в практике обучения.
Актуальность темы обусловлена противоречием между доступностью для образовательных учреждений роботов-манипуляторов, аналогичных широко используемым в промышленности, медицине и других областях и отсутствием системного подхода к изучению их возможностей на основе решения традиционных задач. Создание учебного полигона для такого робота позволит учащимся получить практические навыки для работы с ним.
Предмет исследования: процесс обучения человека решению задач по программированию робота-манипулятора.
Объект: разработка дидактических средств для изучения возможностей робота- манипулятора DOBOT Magician.
Целью работы является создание учебного полигона для робота-манипулятора DOBOT Magician, который позволит унифицировать процесс обучения решению практических задач....
✅ Заключение
Важно отметить, что робототехника — это междисциплинарная область, которая сочетает в себе информатику и инженерию для проектирования и создания роботов. Со временем роботы превратились из простых механических устройств в сложные системы, способные выполнять различные задачи. История робототехники свидетельствует о значительных технологических достижениях и использовании роботов во многих различных областях, от промышленности до бытовых нужд. Современные роботы не только выполняют опасную и рутинную работу, но и занимаются высокоточными операциями, что существенно расширяет их функции и области применения.
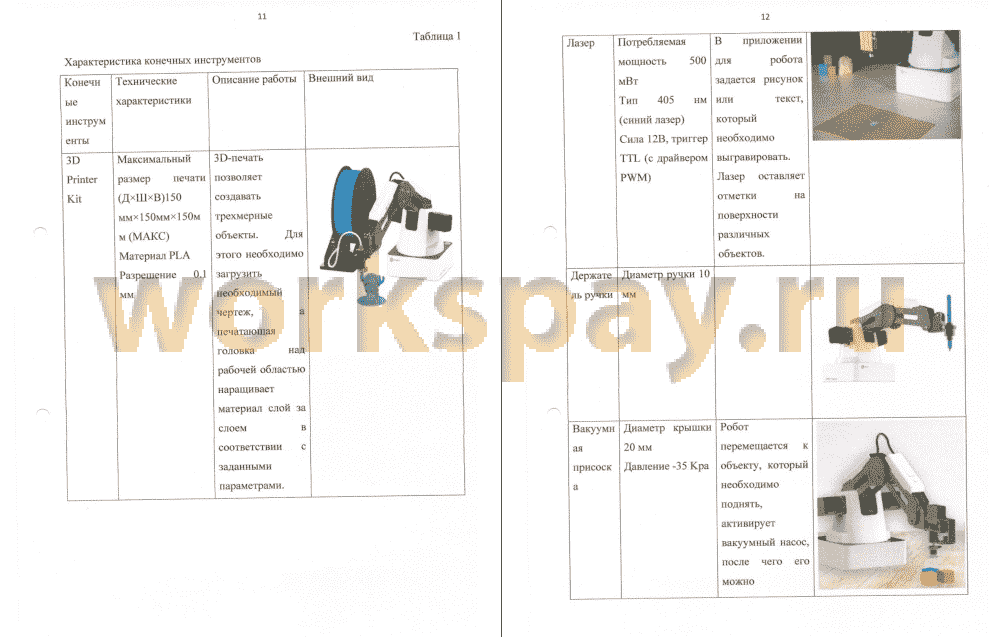
Назначение DOBOT Magician довольно простое: это многофункциональная четырехосевая роботизированная рука размером с настольный компьютер, предназначенная для практического обучения. Но DOBOT может не только перемещать разные вещи с места на место, устройство поставляется с различными насадками, позволяющими осуществлять ЗО-печать, лазерную гравировку, письмо и рисование, а также захват и вакуумную откачку. Будь то пайка печатных плат или работа с пером для ЗО-печати, DOBOT Magician способен выполнять самые разнообразные задачи.
Исследования показали, что возможности обучения важны в образовании, особенно в контексте обучения робототехнике. Места проведения служат инструментом практического обучения, давая студентам возможность применить теоретические знания на практике. Работа в пространстве обучения робототехнике не только развивает навыки командной работы, но и критическое мышление, а также вдохновляет на дальнейшее обучение и карьерный рост в области робототехники.
Проектирование полигона имеет определенный план. Самое главное определить цели и задачи, где совместно с техническими характеристиками можно создать учебный полигон. Для разработки полигона потребовались знания в области инженерии, робототехники и педагогики.
В разработке полигона важную роль сыграло участие технопарка педагогического университета В.П. Астафьева, именно там был собран и опробован полигон для робота-манипулятора.
В рамках учебного процесса предлагаются задания по игре в крестики-нолики, выкладыванию костяшек домино, решению задачи Ханойской башни и перемещению цветных кубиков с препятствием.
Современные подходы к образованию акцентируют внимание на практической направленности обучения и использования новейших образовательных технологий. Учебный полигон для робота-манипулятора DOBOT Magician представляет собой отличную возможность объединить теоретические знания с практическим опытом работы на реальном оборудовании. Это позволит учащимся лучше усваивать материал и развивать навыки в области робототехники.
Теоретический анализ показал, что конструкция учебного полигона должна учитывать особенности робота, который существует в двух модификациях: с интегрированным процессором и без него. Это требование стало определяющим при разработке универсального решения, способного эффективно работать с обеими версиями устройства. Разработка учебного полигона в виде ящика со сменными полями, выполняющими роль крышки, позволила достичь необходимой универсальности и гибкости использования.
Результаты исследования могут быть полезны для дальнейших разработок в области образовательных технологий и робототехники. Полученные данные и разработки могут быть использованы для создания аналогичных учебных полигонов для других типов роботов, что способствует повышению качества обучения и подготовки специалистов в данной области.
📕 Список литературы
🖼 Скриншоты