Облака точек представляют собой наборы данных, состоящих из трёхмерных точек; как правило, эти точки предназначены для представления внешней поверхности объекта. Распространённым способом сбора данных облака точек является применение сканирующих приборов, использующих LiDAR (Light Detection and Ranging «обнаружение и определение дальности с помощью света») — технологию измерения расстояния путём излучения света и замера времени возвращения отражённого света на приёмник [32]. Кроме того, устройство многих сканирующих приборов позволяет при сканировании устанавливать их с учётом направления гравитации.
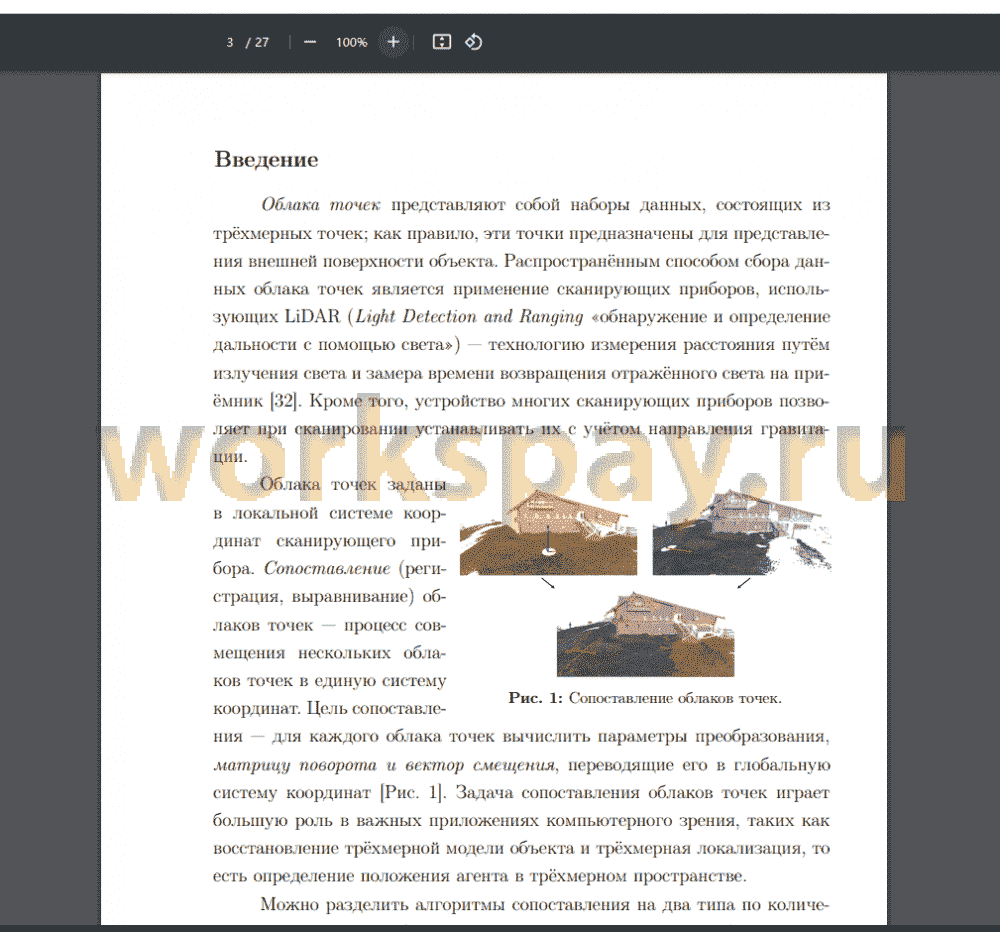
Облака точек заданы в локальной системе координат сканирующего прибора. Сопоставление (регистрация, выравнивание) облаков точек — процесс совмещения нескольких облаков точек в единую систему координат. Цель сопоставления — для каждого облака точек вычислить параметры преобразования, матрицу поворота и вектор смещения, переводящие его в глобальную систему координат [Рис. 1]. Задача сопоставления облаков точек играет большую роль в важных приложениях компьютерного зрения, таких как восстановление трёхмерной модели объекта и трёхмерная локализация, то есть определение положения агента в трёхмерном пространстве.
Можно разделить алгоритмы сопоставления на два типа по количеству выравниваемых облаков: алгоритмы регистрации пары облаков точек и алгоритмы выравнивания нескольких (больше двух) облаков точек.
Большинство алгоритмов попарного сопоставления проходят в два этапа. Сначала осуществляется глобальная регистрация, получающая в качестве результата грубое приближение параметров искомого преобразования. Затем производится локальная регистрация — применяются алгоритмы оптимизации, направленные на уточнение полученной грубой оценки преобразования.
Алгоритмы попарного выравнивания облаков точек можно разделить на две категории: вероятностные алгоритмы и алгоритмы, основанные на получении соответствий между точками выравниваемых облаков, которые затем используются для вычисления параметров преобразования. В вероятностных алгоритмах результат сопоставления сильно зависит от результатов семплирования, поэтому они плохо справляются с выравниванием крупномасштабных облаков точек. Алгоритмы, строящие соответствия между точками, не всегда справляются с выравниванием из-за большого количества выбросов среди соответствий.
В данной дипломной работе исследуются алгоритмы глобального сопоставления пары LiDAR облаков точек и предлагается новый алгоритм, направленный на решение проблем существующих подходов и использование особенностей сканирующих приборов для повышения устойчивости выравнивания.
В рамках данной работы были достигнуты следующие результаты:
• был разработан метод фильтрации неверных соответствий, заметно повышающий процент верных соответствий и увеличивающий вероятность успешного сопоставления;
• была предложена новая метрика, комбинирующая в себе преимущества существующих метрик;
• был разработан метод построения соответствий, использующий направление гравитации;
• полученный алгоритм был протестирован на нескольких доступных датасетах и при применении каждой из предложенных модификаций продемонстрировал заметное улучшение результатов.
Дальнейшая работа может быть направлена на:
• улучшение производительности предложенного метода;
• внедрение данного метода в алгоритм сопоставления нескольких (больше двух) облаков точек.