Тема: Интеллектуальный помощник цифрового двойника сейсморазведки
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
2. Постановка задачи 6
3. Обзор 7
3.1. Архитектура системы 7
3.2. Особенности прокладки профилей 8
3.3. Алгоритмы прокладки маршрутов 9
4. Требования 12
4.1. Функциональные требования 12
4.2. Нефункциональные требования 13
5. Алгоритм прокладки профилей 14
5.1. Учет ограниченной мобильности техники 14
5.2. Учет слоя древостоя и слоя высот рельефа 16
5.3. Учет отклонения от промежуточных точек профиля . . 18
5.4. Эвристика 19
6. Особенности реализации 21
7. Пользовательское тестирование 24
8. Заключение 25
Список литературы 26
📖 Введение
Цифровой двойник сейсморазведки — это информационная система, которая позволяет сделать процесс планирования и подготовки к полевому сезону более быстрым и качественным, а также отслеживать прогресс выполнения геологоразведочных работ. Она представляет собой единую базу проектов сейсморазведки, разделенных на три этапа — планирование, мобилизация техники/персонала и полевой этап. Системой пользуются все участники процесса: кураторы и администраторы, которые планируют и отслеживают весь цикл работ, а также подрядчики, которые являются непосредственными исполнителями работ.
На этапе планирования утверждаются исследуемый контур работ, методика проведения работ, количество и численность бригад, а также планируемый объем работ. На этапе мобилизации указывается техника и персонал, необходимые для проведения работ. На этапе полевых работ исполнители работ заполняют ежедневные сводки, в которых указаны объемы проделанных работ, данные о погодных условиях, причины сниженной производительности или нерабочих дней, а также могут посмотреть аналитику по своим работам.
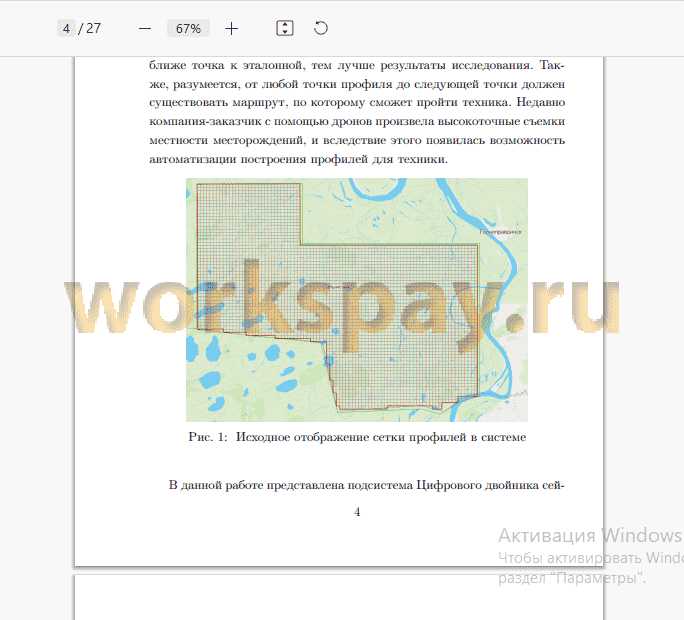
Главной задачей сейсморазведки является сбор геологических данных о месторождениях на местах проведения работ. Для сейсмической обработки местности строится сетка из профилей — дорог, которые прокладываются для будущего движения техники (рис. 1). При прокладке дороги для техники обычно расчищают снег и вырубают деревья, для проезда транспорта. По горизонтальным профилям с некоторым шагом стоят пункты возбуждения — места, где будет производиться взрыв, вибрация или импульс для получения информации о залежах. По вертикальным профилям аналогично стоят пункты приема, где будут собираться сейсмические данные.
На рис. 1 продемонстрировано эталонное расположение профилей, но как видно из картинки, некоторые точки попадают в водные объекты. Также они могут попадать в овраги, места сильной залесенности, болота и так далее. Из-за этого сейсмикам приходится перестраивать каждый профиль, но при этом каждая точка приема или возбуждения должна остаться в пределах некоторого радиуса, в зависимости от метода исследования, иначе сейсмические данные будут неточными. Чем ближе точка к эталонной, тем лучше результаты исследования. Также, разумеется, от любой точки профиля до следующей точки должен существовать маршрут, по которому сможет пройти техника. Недавно компания-заказчик с помощью дронов произвела высокоточные съемки местности месторождений, и вследствие этого появилась возможность автоматизации построения профилей для техники....
✅ Заключение
1. Сделан обзор алгоритмов, решающих задачи прокладки маршрутов — пути Дубинса, алгоритм A*. Из-за большей гибкости в качестве базового алгоритма был выбран A*.
2. Был выполнен сбор требований к подсистеме: проработана задача, стоящая перед сейсмиками, согласованы входные данные алгоритма.
3. Разработан новый алгоритм на основе алгоритма A*, который позволяет учитывать следующие особенности местности - деревья, уклоны, водные объекты, а также низкую проходимость техники и промежуточные точки профиля.
4. Выполнена реализация подсистемы (язык Python, библиотеки GDAL, Numba).
5. Проведено пользовательское тестирование, которое показало удовлетворенность пользователей подсистемой.
В настоящее время для передачи заказчику подсистемы необходимо завершение работы команды, которая занимается связной задачей — автоматическим выделением входных для подсистемы географических слоев из исходных данных, полученных от дронов. Также в будущем планируется расширение подсистемы в виде обработки других полезных географических слоев.
📕 Список литературы
🖼 Скриншоты