Тема: Компьютерное моделирование нелинейных наблюдателей в морских системах динамического позиционирования
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
Обзор литературы 5
Глава 1. Содержательная постановка задачи 7
1.1. Задача минимизации времени переходного процесса 7
1.2. Задача минимизации дисперсии ошибки оценивания 7
1.3. Трудности поиска решений 8
Глава 2. Математическая постановка задачи 10
2.1. Математическая модель 10
2.2. Формальная постановка задач 12
2.2.1. Задача минимизации времени переходного процесса 12
2.2.2. Аддитивный белый Гауссов шум 13
2.2.3. Задача минимизации дисперсии ошибки оценивания 13
Глава 3. Предлагаемый подход к решению 15
3.1. Многокритериальная оптимизация 15
3.2. Линейная свертка критериев 15
3.3. Свертка критериев введением ограничений 16
3.4. Варианты вспомогательных функционалов 18
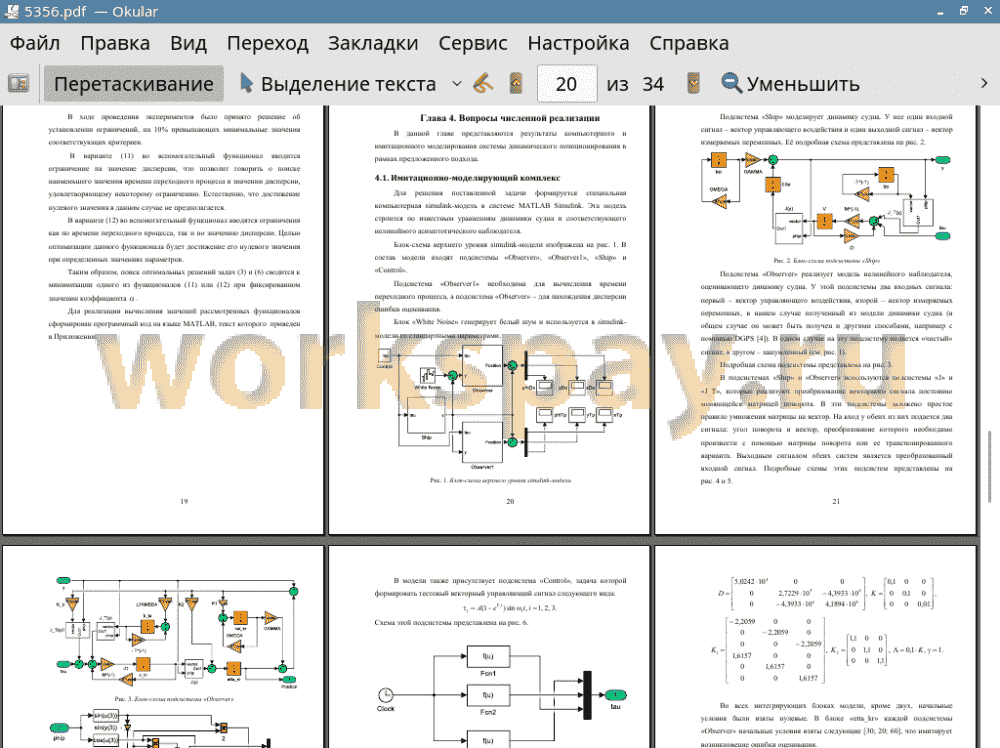
Глава 4. Вопросы численной реализации 20
4.1. Имитационно-моделирующий комплекс 20
4.2. Настройка системы 23
4.3. Анализ чувствительности 24
4.4. Метод решения 25
4.5. Решение задачи 25
Выводы 30
Заключение 32
Список литературы 33
Приложение 34
📖 Введение
Кроме того, в реальных условиях почти все измерения состояний динамического объекта зачастую зашумлены, что нельзя не принимать во внимание. Это, в свою очередь, приводит к возникновению помех в измерениях состояний динамического объекта и росту ошибки оценивания. Решение этой проблемы особо важно, так как при больших значениях ошибки оценивания разница между измерениями состояний и их реальными значениями будет достигать слишком больших значений, что будет негативно влиять на качество процессов управления, в которых используются формируемые оценки.
Системы управления динамическим позиционированием предназначены для удержания судна в заданной позиции или на заданном курсе, его следования по заданному маршруту или перемещения на небольшие расстояния автоматически с высокой точностью посредством использования судовых движителей и подруливающих устройств. Эти системы представляют особую важность в первую очередь для судов, которые в связи с характером выполняемых работ должны длительное время удерживать заданную позицию или менять свои позиции строго в заданном порядке и с высокой точностью. К таким судам можно отнести суда снабжения, мобильные буровые платформы и буровые суда, суда- кабелеукладчики и суда-трубоукладчики. Задачи, выполняемые перечисленными судами крайне важны, ошибки при выполнении подобных работ недопустимы и стоят очень дорого. Время переходного процесса и дисперсия ошибки оценивания играют существенную роль в управлении системами динамического позиционирования, что позволяет говорить об актуальности обозначенных задач.
Данная работа посвящена преодолению ряда трудностей для частной ситуации, относящейся к синтезу системы управления динамическим позиционированием надводного судна. Предлагается вычислительный подход к настройке нелинейного наблюдателя с использованием системы MATLAB Simulink.
✅ Заключение
1. Сформулирована задача многокритериальной оптимизации нелинейного асимптотического наблюдателя и предложены способы ее численного решения.
2. Разработан имитационно-моделирующий комплекс в среде MATLAB-Simulink для проведения числовых экспериментов с разработанными методами.
3. Проведено численное решение задачи о построении нелинейного асимптотического наблюдателя для конкретного практического примера.
📕 Список литературы
🖼 Скриншоты