Тема: Разработка системы управления траекторным движением мобильного робота
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
2 Постановка задачи и обзор литературы 4
2.1 Постановка задачи 4
2.2 Обзор литературы 5
3 Глава 1. Решение глобальной задачи 6
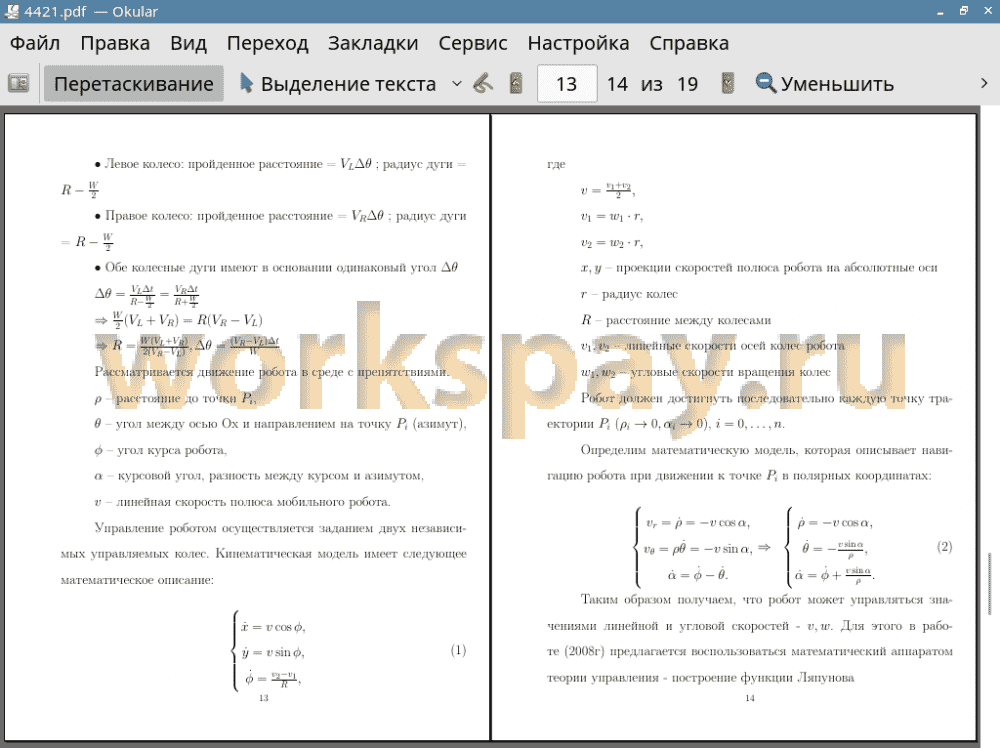
3.1 Описание математической модели 6
3.2 Реализация 7
3.3 Результаты 11
4 Глава 2. Решение локальной задачи 12
4.1 Разработка управляемой математической модели 12
5 Выводы 16
6 Заключение 17
Список литературы 18
📖 Введение
RRT (rapidly exploring random tree) - это алгоритм, разработанный для эффективного поиска путей в пространстве путем построения случайного дерева, заполненяющего пространство. Быстро исследующие случайные деревья - динамическая структура данных, предназначенная для исследования пространства состояний. Дерево строится постепенно из ребер и вершин, выбранных случайным образом из пространства поиска, и по своей природе его рост имеет случайный характер. RRT - алгоритмы были разработаны Steven M. LaValle и James J. Kuffner Jr [1, 3]. Эти алгоритмы хорошо работают не только со стационарными препятствиями, но и динамическими, и используются при автономном планировании движения робота.
✅ Заключение
1. Рассмотрены модификации алгоритмов быстро-исследующих случайных деревьев (RRT-алгоритм) для определения точек возможной траектории движения полюса мобильного робота.
2. Реализован RRT-алгоритм, который находит точки траектории, обеспечивающей обход заданных стационарных препятствий при перемещении мобильного робота из начального положения в конечное.
3. В приложении представлен исходный код программы, которая при задании конфигурации поля (размеры поля, радиус робота, координаты препятствий) позволяет произвести моделирование траектории полюса робота. Примеры работы алгоритма представлены на рисунках
4. Представлена математическая модель управляемого движения мобильного робота с дифференциальным приводом, на основании реализации которой можно провести оценку управляющих воздействий, обеспечивающих построение модельной траектории основания мобильного робота.
📕 Список литературы
🖼 Скриншоты