Тема: Фильтрация волнения в системе динамического позиционирования морских судов
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
Постановка задачи 5
Обзор литературы 7
Глава 1. Математические модели в задаче динамического позиционирования морских судов 9
1.1. Математическая модель морского судна 9
1.2. Математические модели внешнего возмущения и волнения 11
Глава 2. Синтез законов управления процессом позиционирования 13
2.1. Подход, основанный на оценке вектора внешних возмущений 13
2.2. Динамическая коррекция закона управления 14
Глава 3. Частотные особенности систем управления 16
3.1. Передаточные матрицы линейных стационарных систем 16
3.2. Линеаризация уравнений движения 17
3.3. Построение амплитудно-частотных характеристик в среде MATLAB 18
Глава 4. Компьютерная модель системы управления 20
4.1. Структура компьютерных моделей динамических систем 20
4.2. Реализация компонентов компьютерной модели 23
Глава 5. Результаты имитационного моделирования 27
5.1. Параметры математической модели надводного судна и законов управления 27
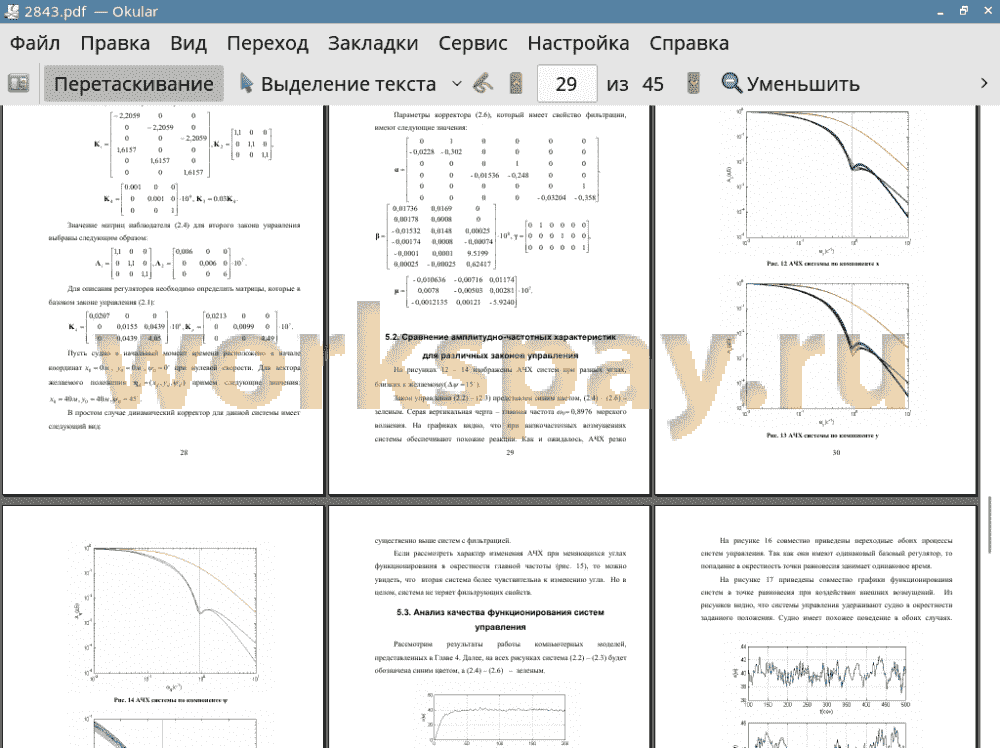
5.2. Сравнение амплитудно-частотных характеристик для различных законов управления 29
5.3. Анализ качества функционирования систем управления 32
Выводы 37
Заключение 38
Список литературы 39
Приложение 41
📖 Введение
Этот комплекс включает в себя измерительные и исполнительные устройства, а также центральный бортовой компьютер, реализующий обработку поступающей информации по заданному алгоритму (закону управления) с выработкой управляющих сигналов, подаваемых на приводы.
Существенной особенностью системы является то, что удержание судна в заданном положении должно осуществляться исключительно с помощью исполнительных органов, находящихся на борту. В качестве таковых выступают основные движители, подруливающие устройства, рулевые колонки Арнессона и т.д. Это позволяет эксплуатировать систему при работе судна в акваториях, имеющих большую глубину.
Заметим, что применение системы ДП не является единственным способом удержания судна в заданном положении: в частности, может быть применена система якорей. Однако такой подход, хоть он и хорошо решает поставленную задачу, но не всегда применим. Во-первых, такая технология не реализуема в морских районах с большими глубинами. Во-вторых, смена желаемого положения занимает больше времени и более сложна, чем для системы ДП.
На практике, система динамического позиционирования не может обеспечить полностью неподвижное положение судна. Причиной этому являются как различные внешние возмущения, например, ветер, течения и волнения, так и конечная точность измерительных устройств. В то же время, операции, использующие динамическое позиционирование, требуют высокой точности стабилизации судна. Выход за пределы допустимых ограничений может привести к сбоям или даже авариям во время исполнения операций. Это, в свою очередь может повлечь за собой серьезные экономические и экологические проблемы.
Задача ДП для морских надводных объектов является одной из важных проблем современного судоходства. Количество судов, которые используют системы динамического позиционирования, увеличивается в последние годы из-за повышенного интереса к разведке природных ресурсов в мировом океане. Наряду с этим, существует еще множество других направлений, в рамках которых применяется системы динамического позиционирования. К ним относятся обеспечение водолазных работ, укладка подводных труб и кабелей, транспортное снабжение, исследовательские задачи и т.д.
✅ Заключение
1. Построена математическая модель динамики судна в процессе его динамического позиционирования и рассмотрены два варианта законов автоматического управления, стабилизирующих судно.
2. Создан компьютерный имитационный моделирующий комплекс, позволяющий проводить вычислительные эксперименты для анализа частотных особенностей различных систем управления.
3. Для конкретного судна, управляемого в режиме динамического позиционирования, проведен сравнительный анализ двух вариантов систем управления с фильтрующими свойствами и сделаны выводы об их преимуществах и недостатках.
📕 Список литературы
🖼 Скриншоты