Введение 4
1. Уравнение Дуффинга 5
2. Постановка задачи 8
3. Известные результаты о синхронизации с помощью неперывного управления 10
4. Основные результаты 15
4.1. Оценка решения системы Дуффинга с непрерывным управлением и возмущением 15
4.2. Оценка решения системы Дуффинга с дискретным управлением 18
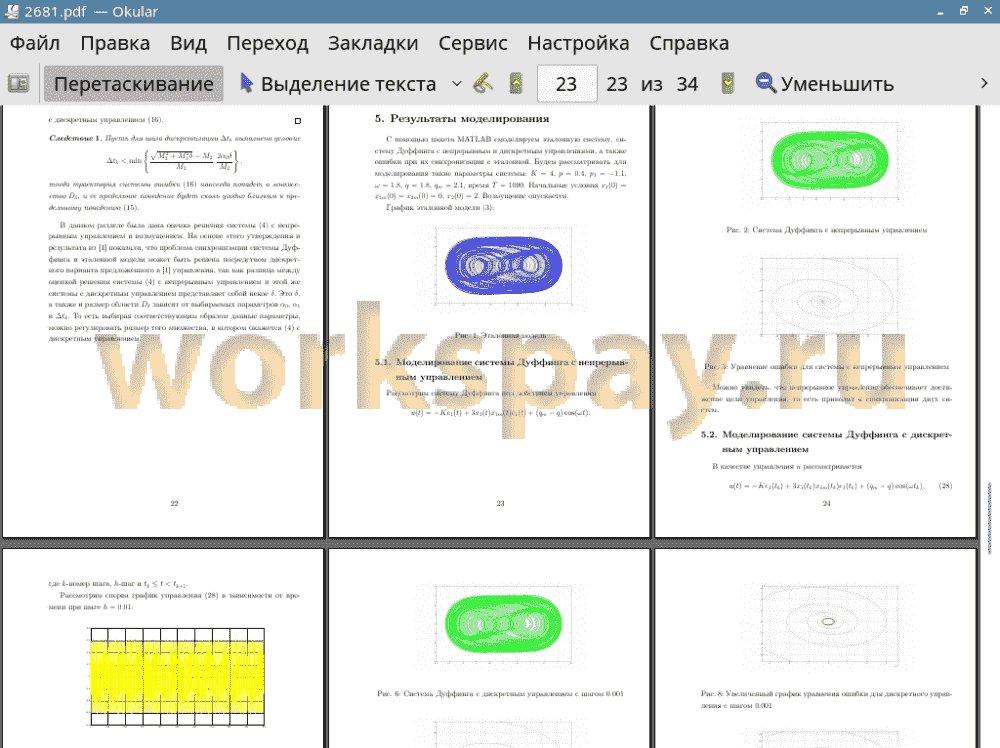
5. Результаты моделирования 23
5.1. Моделирование системы Дуффинга с непрерывным управлением 23
5.2. Моделирование системы Дуффинга с дискретным управлением 24
Заключение 29
Приложение 30
Список литературы 34
В представленной работе основным объектом изучения является дифференциальное уравнение второго порядка, называемое уравнением Дуффинга и описывающее широкий спектр физических систем, а также демонстрирующее хаотическое поведение. Исследуется задача синхронизации этого уравнения с некоторой эталонной моделью посредством управления. Ранее уже было предложено непрерывное управление, решающее эту задачу. Тем не менее, в наши дни управление обычно осуществляется с помощью компьютера, таким образом, важно показать, что дискретное управление также приводит к достижению поставленной цели.
Итак, в работе рассмотрены уже существующие результаты о непрерывном управлении системой Дуффинга. На их основе проведено исследование предельного поведения траектории ошибки синхронизации для системы с добавленным возмущением и под действием непрерывного управления. С использованием этого результата проводится анализ поведения ошибки для системы с аналогичным, но дискретизированным управлением. Доказывается, что при достаточно малом шаге дискретизации предельное поведение траектории ошибки будет сколь угодно близким к предельному поведению ошибки для системы с непрерывным управлением. Также представлено моделирование траекторий данных систем в MATLAB.
В работе рассмотрена задача исследования дискретного адаптивного управления в проблеме синхронизации уравнения Дуффинга. Подход к этой проблеме основан на решении вспомогательной задачи непрерывного адаптивного управления. Используется функция Ляпунова, построенная для системы с непрерывным адаптивным управлением. Оценивается изменение поведения системы при дискретизации алгоритма управления.
Была получена оценка предельного поведения функции Ляпунова для системы с непрерывным управлением и возмущением. Также получено, что предельное поведение функции Ляпунова для системы с дискретным управлением приближается к предельному поведению функции Ляпунова для системы с непрерывным управлением, если шаг дискретизации достаточно мал. Этот результат проиллюстрирован с помощью моделирования траекторий указанных систем в MATLAB.