Список условных обозначений 4
Введение 5
Постановка задачи 6
1. Исследование записи видеорегистратора 7
1.1. Определение условий распознавания 7
1.2. Определение признаков распознавания 9
1.3. Заключение 10
2. Декомпозиция задачи и обзор алгоритмов 14
2.1. Определение основных этапов решения задачи 14
2.2. Методы поиска граничных пикселей 15
2.3. Методы кластеризации 20
2.4. Методы построения областей 23
3. Проектирование конечного алгоритма 27
3.1. Предварительная обработка изображения 27
3.2. Поиск граничных пикселей 28
3.3. Кластеризация граничных пикселей 30
3.4. Определение области дороги 33
3.5. Финальная структура алгоритма 37
4. Анализ сложности алгоритма 39
4.1. Анализ предварительной обработки изображения 39
4.2. Анализ поиска граничных пикселей 40
4.3. Анализ кластеризации граничных пикселей 40
4.4. Анализ объединения кластеров различных классов 41
4.5. Анализ проецирования результата на кадр записи 41
4.6. Финальная сложность спроектированного алгоритма 43
5. Реализация алгоритма 44
5.1. Обзор используемых библиотек 44
5.2. Оптимизация алгоритма 44
6. Метрики качества 46
6.1. Тестовая запись 46
6.2. Профилирование реализованного алгоритма 46
6.3. Качественные метрики алгоритма 47
7. Результаты тестирования 49
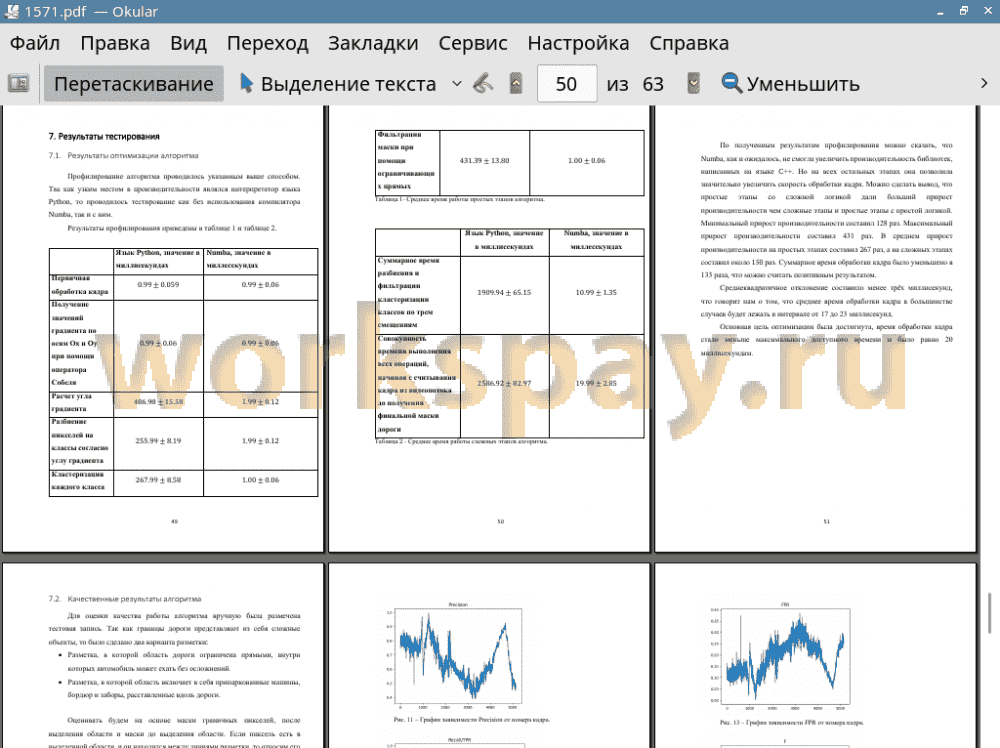
7.1. Результаты оптимизации алгоритма 49
7.2. Качественные результаты алгоритма 52
7.3. Поэтапная демонстрация алгоритма 58
Заключение 61
Список литературы 62
В настоящее время информационные технологии активно внедряются в транспортные средства. Они помогают водителю управлять транспортным средством в течении всего пути, начиная от старта и заканчивая процессом парковки. Наиболее известными примерами являются антиблокировочная система и система курсовой устойчивости. Все они в разной степени помогают водителю, начиная от проблем, возникающих с механической частью автомобиля и заканчивая автономным движением без участия водителя в процессе.
Основная идея всех этих технологий заключается в автоматизации контроля систем автомобиля на разных уровнях. Одной из систем, помогающих вождению автомобиля, является система ADAS.
Системы ADAS используют датчики, подключенные к IoT, и на основе получаемых данных решают в режиме реального времени, стоит ли предупреждать водителя об опасной ситуации и брать ли функции вождения в критических ситуациях на себя. Благодаря подобным системам значительно снижается риск ДТП.
Одной из актуальных задач систем ADAS является помощь водителю во время управления автомобилем на заснеженной дороге. Основной сложностью решения данной задачи является определение границ дороги, на основе которых система ADAS должна принимать решения. Существующие алгоритмы и системы способны распознавать границы дороги только при помощи дополнительных датчиков или при идеальных условиях. Под идеальными условиями подразумевается солнечный дневной свет и отсутствие осадков в виде снега на дороге. Алгоритмов, распознающих границы заснеженной дороги по видео в режиме реального времени и дающих качественный результат, сейчас не существует.
В ходе данной работы были достигнуты следующие результаты:
• изучены методы поиска границ на изображении и методы оптимизации алгоритмов;
• произведена декомпозиция поставленной задачи;
• согласно результатам декомпозиции выбраны алгоритмы, подходящие по критериям алгоритмической сложности и качества;
• спроектирован, реализован и оптимизирован алгоритм распознавания границ заснеженной дороги;
• решение протестировано. Время обработки кадра составило 20 миллисекунд, точность составила 75%.