Введение 3
Постановка задачи 5
Обзор литературы 6
Глава 1. Выбор архитектуры свёрточной нейронной сети 10
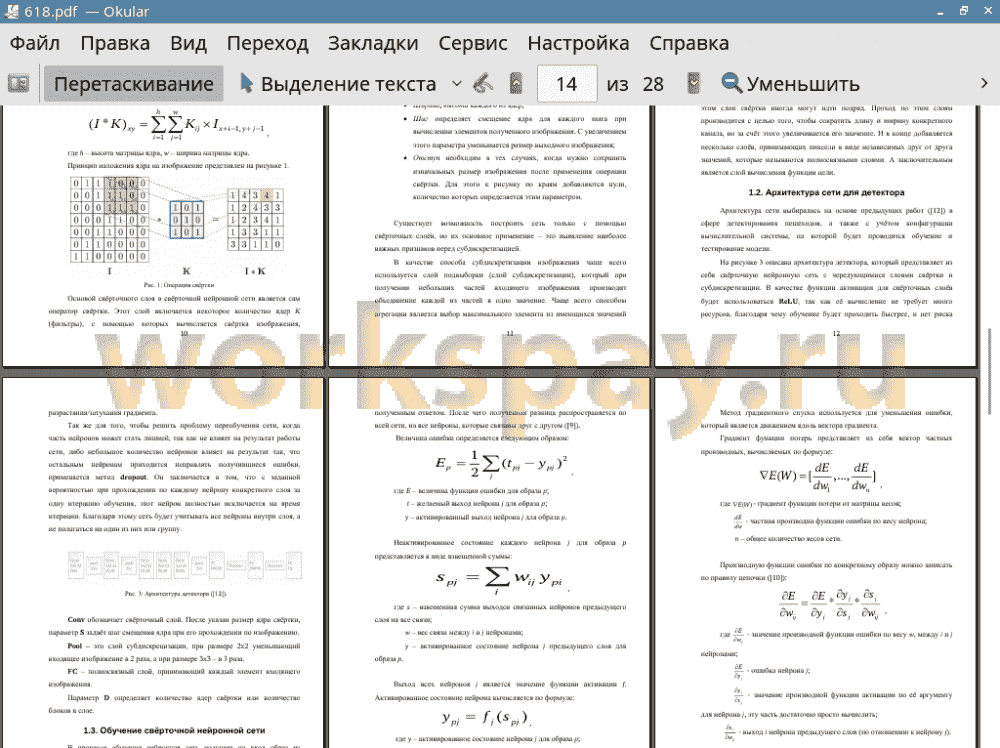
1.1. Описание работы свёрточной нейронной сети 10
1.2. Архитектура сети для детектора 12
1.3. Обучение свёрточной нейронной сети 13
Глава 2. Реализация системы 17
2.1. Подготовка среды для разработки 17
2.2. Подготовка базы пешеходов 17
2.3. Создание модели 18
Глава 3. Исследование детектора 20
3.1. Критерии тестирования работы детектора 20
3.2. Оценка критериев 20
3.3. Выводы 21
Заключение 22
Список литературы 23
Приложение 25
Дорожно-транспортные происшествия являются повсеместным явлением, основной из причин которых является человеческий фактор, так как по различным причинам человек не способен всегда своевременно реагировать на изменяющуюся обстановку на дороге. А из-за постоянного роста населения в мире число участников дорожного движения только увеличивается, что приводит к ещё большему числу аварий, часть которых с летальным исходом. Поэтому одним из способов предупреждения ДТП в настоящее время используются системы обнаружения пешеходов. Такая система используется для отслеживания положения и перемещения пешеходов, чтобы предотвратить столкновение с их участием, либо уменьшить сопутствующий ущерб в критических ситуациях, когда избежать аварии невозможно.
В связи с возрастающей популярностью беспилотных транспортных средств актуальность создания таких систем только увеличивается.
Изначально в беспилотных транспортных средствах для обнаружения пешеходов использовалось данные не с камеры, а с радара, лидара и других датчиков. Но подобная система из сенсоров имеет высокую цену и требует дорогого обслуживания в случае выхода из строя, что делает приобретение такого автомобиля экономически затруднительным для покупателя. Поэтому разработка методов для обычной камеры приобрела такую популярность.
Обнаружение пешеходов до сих пор считается не до конца решённой задачей компьютерного зрения. Виной этому является неоднородность внешнего вида пешеходов, которая возникает по причине разных поз, одежды, также влияет фон, на котором запечатлён пешеход, и освещённость, а также скорость обработки поступающих изображений, которая очень критически важна для беспилотных автомобилей.
Существует множество алгоритмов, часть которых предлагает высокую точность, но низкую скорость работы, а другие наоборот, высокую скорость распознавания, но не с такой большой точностью детектирования. И в такой сфере, как дорожное движение, беспилотный автомобиль должен ориентироваться в пространстве как минимум с реакцией обычного водителя, так как является средством повышенной опасности, в связи с чем любая задержка или неточность распознавания сможет привести к человеческим жертвам.
В результате работы были получены следующие результаты:
• Проведён анализ существующих методов и алгоритмов распознавания пешеходов и был сделан выбор одного из них для дальнейшего исследования.
• Проанализирована архитектура выбранного метода: свёрточные нейронные сети.
• Подобрана структура свёрточной нейронной сети для детектора.
• Реализован прототип системы детектирования пешеходов.
• Выполнен анализ работы полученного прототипа.