Тема: Построение карты глубины по изображениям стереопары
Характеристики работы
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
Постановка задачи 4
Обзор литературы 5
Глава 1. Основные подходы 6
1.1. Общая схема 6
1.2. Выбор алгоритма 7
Глава 2. AD-Census 8
2.1. Ценовая метрика 8
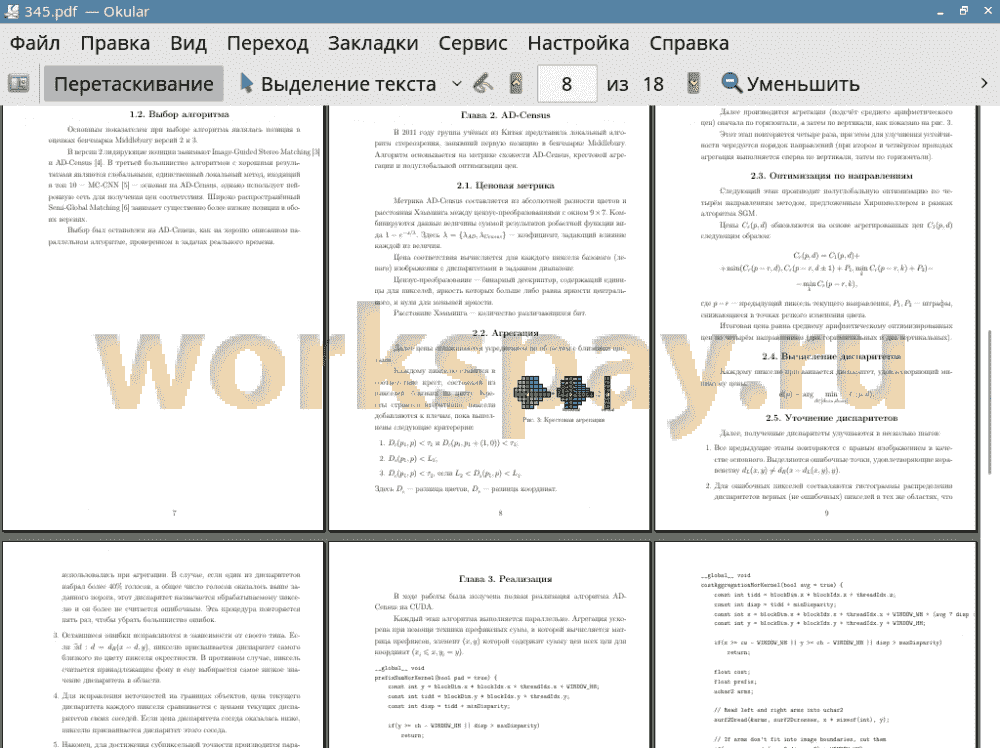
2.2. Агрегация 8
2.3. Оптимизация по направлениям 9
2.4. Вычисление диспаритетов 9
2.5. Уточнение диспаритетов 9
Глава 3. Реализация 11
Глава 4. Модификация алгоритма 14
Выводы 15
Заключение 17
Список литературы 18
📖 Введение
Компьютерное стереозрение позволяет получать карты глубины посредством фиксированной системы из двух оптических камер. Это дешевле, а в некоторых задачах и эффективнее, чем активные системы, такие как Microsoft Kinect и Intel RealSence.
Стереозрение применяется в таких областях, как распознавание жестов, обход препятствий и 3D-реконструкция. Оно является областью активных исследований на протяжении многих лет, однако эффективное со всех точек зрения решение пока ещё не найдено.
✅ Заключение
📕 Список литературы
🖼 Скриншоты