Тема: Формальная верификация окружения времени выполнения робототехнической системы
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
1. Цель и постановка задачи 7
2. Обзор 8
2.1. Выбор метода верификации 8
2.2. Требования к инструменту верификации 9
2.3. Выбор верификатора 10
2.4. Инструменты автоматической генерации модели 11
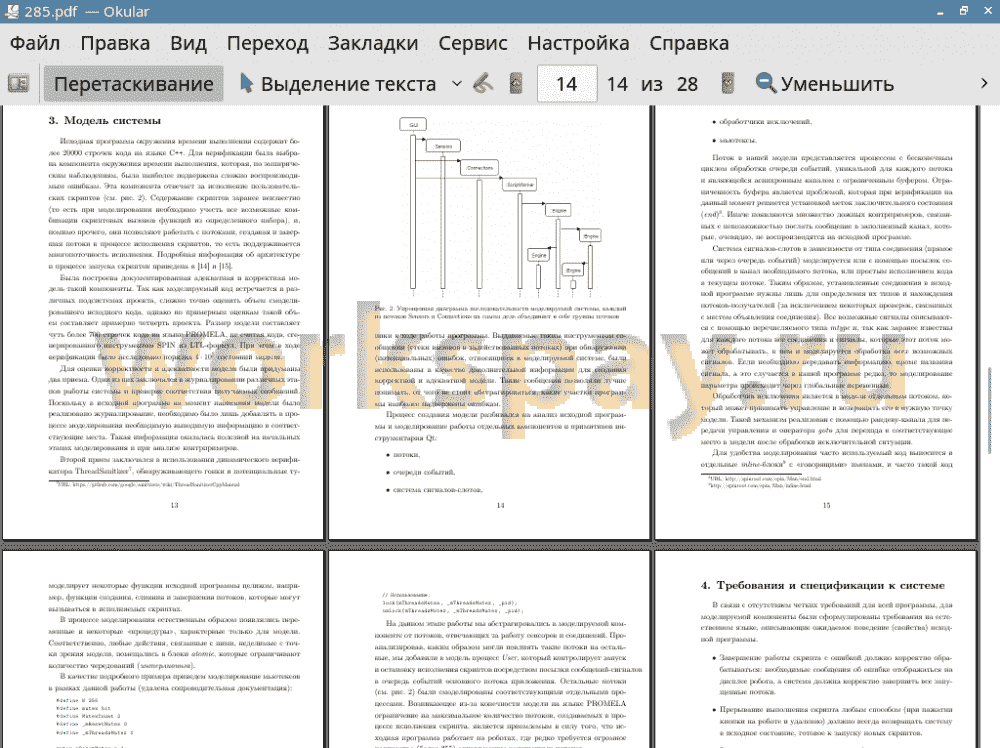
3. Модель системы 13
4. Требования и спецификации к системе 18
5. Верификация и анализ контрпримеров 20
6. Заключение 25
Список литературы 26
📖 Введение
В современном мире имеется большое количество автоматических систем, например автопилот в самолете или спутник, и критически важна корректная и безотказная работа всех компонентов таких систем. Поэтому на первый план выходят свойства надежности и предсказуемости поведения системы. Таким образом, формальная верификация программного кода, позволяющая существенно повысить качество системы, становится важнейшей областью научных исследований в информатике. Формальной верификацией программы, согласно [21], будем называть приемы и методы формального доказательства (или опровержения) того, что модель программной системы удовлетворяет заданной формальной спецификации (см. рис. 1).
Рис. 1: Общая схема верификации
Уже сейчас верификация является промышленным стандартом в критических областях, связанных как с дорогостоящими проектами, так и с человеческими жизнями [4]. С помощью формальной верификации можно доказать некоторые важные свойства системы, гарантировав отсутствие ошибок определенного типа и правильное функционирование системы. Это происходит за счет того, что верификация позволяет провести исчерпывающую проверку всех возможных вычислений модели системы, обнаруживая редко проявляющиеся ошибки [20], которые очень сложно проверить тестированием. Важно понимать, что проведя формальную верификацию и тестирование, нельзя гарантировать полное отсутствие ошибок в системе. Но при использовании этих методов вместе существенно повышается уровень доверия к системе.
На сегодняшний день для верификации сложных параллельных, многопоточных систем зарекомендовал себя метод проверки модели (model checking) [21]. Это метод проверки того, что данная формальная модель системы удовлетворяет ограничению, поставленному чаще всего в терминах какой-либо темпоральной логики, то есть логики, в которой истинность логических утверждений зависит от времени.
Важной частью автоматических систем являются роботы. Программное обеспечение для них часто относится к классу так называемых реагирующих систем, то есть систем, основная функция которых является поддержанием взаимодействия с окружением, а не преобразование информации. Такие системы могут бесконечно работать, они контролируют окружение, реагируя на внешние события. Вычисления на таких системах задаются бесконечной последовательностью состояний во времени. И именно с помощью формальной верификации возможно проанализировать все возможные вычисления таких систем.
В рамках Межвузовской Проектной Лаборатории Робототехники создают программную часть для контроллера робототехнического конструктора TRIK [13]. На таком контроллере, помимо операционной системы, запущено окружение времени выполнения [16], предоставляющее интерфейс программирования приложений для программирования робота, используя язык C++ с инструментарием Qt2 или скриптовый язык Qt Script3, позволяющее исполнять на роботе скрипты, а также управлять роботом извне. Скриптовый язык упрощает программирование роботов, однако окружение времени выполнения является многопоточной, параллельной программой, что обуславливает высокую сложность обнаружения ошибок. Такие роботы могут использоваться как автоматические системы. И безошибочное функционирование окружения времени выполнения в таких случаях является важной задачей. Отметим, что сама программа, окружение времени выполнения, написана на языке C++ с помощью инструментария Qt.
Таким образом, в нашем случае наиболее подходящим методом для формальной верификации окружения времени выполнения робототехнической системы является метод проверки модели. В классическом виде наиболее трудоемкой частью данного метода является разработка самой модели окружения времени выполнения [21]. Сложность связана с большим размером программы и постоянно возникающей при моделировании проблемой комбинаторного взрыва [23]. Необходимо также описать в терминах темпоральной логики интересующие свойства данной программы. Остальная часть работы, связанная с проверкой свойств на модели, выполняется автоматизировано с помощью соответствующих инструментов верификации.
✅ Заключение
• Построена документированная, корректная и адекватная модель верифицируемой системы на языке PROMELA.
• Сформулированы требования на естественном языке и разработаны спецификации к системе на языке LTL на основе ожидаемого поведения исходной системы.
• Проведена верификация с помощью инструмента SPIN, найдены тринадцать ошибок и одно предупреждение.
• В качестве побочного результата при построении модели были найдены шесть недочетов, не связанных с процессом формальной верификации.
Исходный код модели, трассы контрпримеров и комментарии к ним выложены в открытый доступ [10].
Смоделированные компоненты и примитивы инструментария Qt могут быть использованы в других моделях. Модель документирована и может эволюционировать вместе с разработкой исходной программы окружения времени выполнения. Ввиду непредвиденно большого объема работы по анализу контрпримеров, не были доказаны некоторые существенные свойства системы. В качестве возможного продолжения работы существует две идеи:
• продолжить формальное доказательство свойств системы для текущей модели;
• в процессе моделирования большинство системных вызов не были учтены, к примеру, в модели практически полностью игнорируется взаимодействие окружения с драйверами датчиков робота; применение активно развивающегося подхода software model checking видится перспективным для решения этой проблемы.
📕 Список литературы
🖼 Скриншоты