Тема: Цифровые системы в электромеханическом преобразовании энергии
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
1 Анализ контроллеров и методов управления мотор колёсами 9
1.1 Электродвигатели в электротранспорте 9
1.2 Типы двигателей мотор колес 15
1.3 Системы управления бесщеточными двигателями постоянного тока 18
1.4 Рекуперативное торможение 28
1.5 Датчик акселератора и торможения 29
2 Разработка функциональной и принципиальной схемы контроллера мотор колеса 31
2.1 Разработка функциональной схемы контроллера 31
2.2 Структурная схема датчика акселератора и торможения 32
2.3 Система рекуперативного торможения 34
2.4 Разработка принципиальной схемы 37
2.5 Силовые транзисторы 41
2.6 Силовой инвертор 47
2.7 Схема датчиков акселератора и торможения 49
3 Разработка алгоритма управления мотор колесом 59
3.1 Общий алгоритм работы контроллера 59
3.2 Алгоритм обработки прерываний 62
3.3 Стратегия переключения силовых ключей инвертора 63
3.4 Программная реализация алгоритма управления мотор колесом 66
Заключение 85
Список использованных источников 87
📖 Введение
Со стороны потребителя это вызвало повышение требований предъявляемых к работе транспорта в целом, в том числе и к улучшению плавности хода, торможения и запаса хода. Данной проблеме стало уделяться более серьёзное внимание в плане поиска путей совершенствования конструкций мотор колес, так и алгоритмов управления ими.
Таким образом, актуальность работы обуславливается постоянным улучшением конструкции контроллеров управления мотор колесами легкого электрического транспорта, для достижения высоких показателей безопасности и комфорта водителя и пассажиров.
Целью магистерской диссертации является улучшение характеристик в использовании и эксплуатации и конкурентоспособности лёгкого электротранспорта путем повышения его эффективности и комфортабельности за счет управления мотор колесом в различных режимах эксплуатации.
Задачи исследования:
• проанализировать конструкции, принципы работы и алгоритмы управления мотор колесами с бесколлекторным двигателем постоянного тока современного лёгкого электротранспорта;
• разработать алгоритм управления мотор колесом легкого электротранспорта;
• разработать схему контроллера управления мотор колесом легкого электротранспорта.
Основные положения выносимые на защиту:
• алгоритм управления мотор колесом легкого электротранспорта;
• схема контроллера управления бесколлекторным двигателем постоянного тока в составе мотор колеса лёгкого электротранспорта
Новизна магистерской диссертации. Разработан алгоритм управления мотор колесом легкого электротранспорта, отличающийся от известных ранее способом обработки сигналов, позволяющий получить синтезированный метод рекуперативного торможения.
Практическая значимость. Разработана схема контроллера управления бесколлекторным двигателем постоянного тока в составе мотор колеса лёгкого электротранспорта, осуществляющая аппаратную поддержку разработанного в ходе работы алгоритма управления.
Основные положения магистерской диссертации нашли отражение в двух публикациях [1, 2].
Магистерская диссертация состоит трех глав, основных выводов и результатов, списка использованной литературы
В первой главе произведено исследование и анализ существующих контроллеров и методов управления мотор колёсами лёгкого электротранспорта, их элементов и принципов работы.
В результате проведенного анализа, было выявлено, что построение контроллера для управления мотор колесом легкого электротранспорта зависит от выбора типа мотор колеса.
Используя открытые источники информации, были проанализированы алгоритмы управления и схемотехника построения контроллеров Volta и SM310 для бесколлекторных электродвигателей мотор колес.
Во второй главе диссертационной работы была разработана функциональная схема контроллера управления мотор колесом лёгкого электротранспорта, основанная на использовании бесколлекторного двигателя постоянного тока в составе мотор колеса.
Разработанная на данном этапе схема позволяет решить следующие задачи:
• управление инвертором, формирующего необходимые напряжения для бесколлекторного электродвигателя мотор колеса обеспечивая регулировку скорости вращения мотор колеса с возможностью ограничения скорости и обеспечения работы электродвигателя в трехскоростном режиме;
• ограничение тока для устранения рывков и перегрузки при старте и при торможении вызывающие переходные процессы генераторного режима работы мотор колеса;
• принимать сигналы от ручки акселератора, и на основе воспринятой информации управлять скоростью вращения мотор колеса, регулируя ток, подаваемый к электродвигателю;
• поддержание постоянной скорости в не зависимости от нагрузки на мотор колесо;
• функционирование системы рекуперативного торможения;
• поддержание тормозного момента электродвигателя;
• подключение и отображение на модуле индикации параметров работы системы.
Разработана схема контроллера управления бесколлекторным двигателем постоянного тока в составе мотор колеса лёгкого электротранспорта, осуществляющая аппаратную поддержку разработанного в ходе работы алгоритма управления.
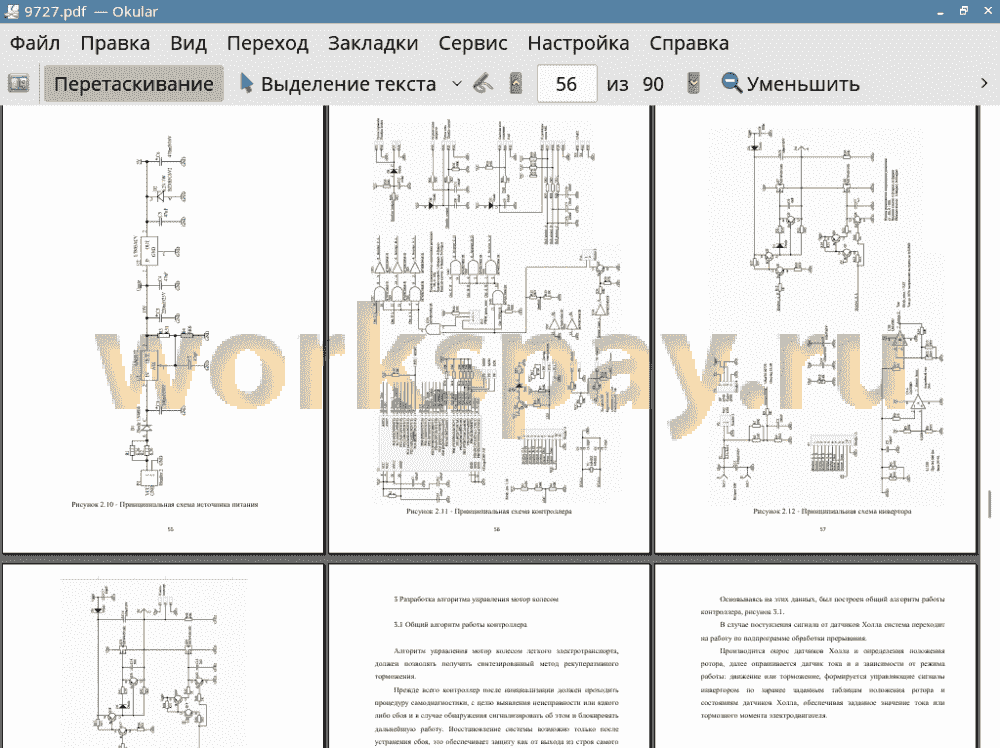
Электронный блок контроллера управления бесколлекторным электродвигателем мотор колеса реализован на современной элементной базе, обладающей большой устойчивостью к изменениям напряжения питающей батареи, температуре окружающей среды, а так же к импульсному воздействию помех. Принципиальная схема разработанного электронного блока контроллера управления бесколлекторным электродвигателем мотор колеса легкого электротранспорта представлена во 2 главе.
В третьей главе диссертационной работы был разработан алгоритм управления мотор колесом легкого электротранспорта, отличающийся от известных ранее способом обработки сигналов, позволяющий получить синтезированный метод рекуперативного торможения и реализованный на языке высокого уровня Си.
Работа системы построена на основе показаний трех датчиков Холла, расположенных на роторе электродвигателя, со смещением друг относительно друга, аналогично, как и катушки статора, в 120 электрических градусов. Метод заключается в формировании вращающегося поля из шести базовых векторов исходя из текущего положения ротора. Таким образом, переключение происходит каждые 1/6 периода.
Также система получает и обрабатывает следующие данные:
1. Ток протекаемый через электродвигатель, измеряемым датчиком тока в цепи питания инвертора;
2. Величину требуемой скорости, задаваемую от оптического датчика рукоятки акселератора;
3. Степень тормозного усилия от оптического датчика ручки тормоза.
Основываясь на этих данных, был построен общий алгоритм работы контроллера.
В случае поступления сигнала от датчиков Холла система переходит на работу по подпрограмме обработки прерывания.
Производится опрос датчиков Холла и определения положения ротора, далее опрашивается датчик тока и в зависимости от режима работы: движение или торможение, формируется управляющие сигналы инвертором по заранее заданным таблицам положения ротора и состояниям датчиков Холла, обеспечивая заданное значение тока или тормозного момента электродвигателя.
После завершения обработки прерывания программа производит возврат к выполнению основного алгоритма.
Общий алгоритм обработки делится на три сегмента:
• управление скоростью движения электротранспорта,
• управление крутящим моментом,
• защита электродвигателя.
В заключительной части работы сделаны выводы что разработка контроллера, основанная на анализе контроллеров - аналогов, исключила их недостатки. Разработанный контроллер обеспечивает хорошие эксплуатационные показатели, а также повышает энерго эффективность использования электротранспорта. Разработан алгоритм управления мотор колесом легкого электротранспорта, отличающийся от известных ранее способом обработки сигналов, позволяющий получить синтезированный метод рекуперативного торможения .
При помощи разработанной в ходе работы схемы контроллера управления бесколлекторным двигателем постоянного тока в составе мотор колеса лёгкого электротранспорта, достигнута аппаратная поддержка разработанного алгоритма управления, на современной элементной базе, с применением высоко интегрированных интегральных микросхем, что повышает показатели качества и надежности, также дало уменьшение габаритов, веса, что также положительно сказывается на надежности в следствии уменьшения действия инерционных сил на проводники и схему в целом.
✅ Заключение
Показано, что доступные аппаратные и программные средства способны автоматически управлять двигателями с неизвестными параметрами.
Подводя итоги, выбор стратегии коммутации зависит от того, какая система стратегии будет использоваться и то, насколько это может быть приемлемым.
Трапецеидальная коммутация является хорошим выбором для недорогих решений, в которых скорость и пульсация крутящего момента не является критичными ограничениями.
В заключительной части работы можно сделать следующие выводы и выделить результаты.
1. На основе анализа контроллеров, для бесколлекторных электродвигателей мотор колес легкого электротранспорта, разработан контроллер управления для бесколлекторных электродвигателей мотор колес легкого электротранспорта, удовлетворяющий требованиям, предъявляемым к современному электротранспорту. Разработка контроллера, основанная на анализе контроллеров - аналогов, исключила их недостатки. Разработанный контроллер обеспечивает хорошие эксплуатационные показатели, а также повышает энерго эффективность использования электротранспорта.
2. Разработан алгоритм управления мотор колесом легкого электротранспорта, отличающийся от известных ранее способом обработки сигналов, позволяющий получить синтезированный метод рекуперативного торможения.
3. При помощи разработанной в ходе работы принципиальной схемы контроллера управления бесколлекторным двигателем постоянного тока в составе мотор колеса лёгкого электротранспорта, достигнута аппаратная поддержка разработанного алгоритма управления.
📕 Список литературы
🖼 Скриншоты