Тема: РАЗРАБОТКА ПРИНЦИПОВ ПОСТРОЕНИЯ СИСТЕМЫ УПРАВЛЕНИЯ ДВУХТЕЛЕЖЕЧНЫМ МОСТОВЫМ КРАНОМ ДЛЯ ТРАНСПОРТИРОВАНИЯ ДЛИННОМЕРНЫХ ГРУЗОВ
Характеристики работы
Закажите новую по вашим требованиям
Представленный материал является образцом учебного исследования, примером структуры и содержания учебного исследования по заявленной теме. Размещён исключительно в информационных и ознакомительных целях.
Workspay.ru оказывает информационные услуги по сбору, обработке и структурированию материалов в соответствии с требованиями заказчика.
Размещение материала не означает публикацию произведения впервые и не предполагает передачу исключительных авторских прав третьим лицам.
Материал не предназначен для дословной сдачи в образовательные организации и требует самостоятельной переработки с соблюдением законодательства Российской Федерации об авторском праве и принципов академической добросовестности.
Авторские права на исходные материалы принадлежат их законным правообладателям. В случае возникновения вопросов, связанных с размещённым материалом, просим направить обращение через форму обратной связи.
📋 Содержание
ВВЕДЕНИЕ 6
ГЛАВА 1. ПЕРЕМЕЩЕНИЕ ДЛИННОМЕРНЫХ ГРУЗОВ
ГРУЗОПОДЪЁМНЫМИ КРАНАМИ С ДВУМЯ ТЕЛЕЖКАМИ 8
1.1 Двухтележечный мостовой кран и требования, предъявляемые к
его системе управления 8
1.2 Существующая схема системы управления спаренными
грузоподъёмными механизмами и их анализ 11
1.3 Постановка задач для выпускной квалификационной работы 26
ГЛАВА 2. РАЗРАБОТКА СИСТЕМ УПРАВЛЕНИЯ ДВУМЯ СПАРЕННЫМИ ЛЕБЁДКАМИ, ПРЕДНАЗНАЧЕННЫМИ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ДЛИННОМЕРНЫХ ГРУЗОВ В ВЕРТИКАЛЬНОМ ПОЛОЖЕНИИ 27
2.1 Разработка системы управления двухтележечным краном с
применением тахогенераторов 27
2.2 Разработка системы управления двухтележечным краном с
применением аналоговых датчиков угла наклона (инклинометров) 31
2.3 Разработка системы управления двухтележечным краном с
применением цифровых датчиков угла наклона (инклинометров) 34
ГЛАВА 3. РАЗРАБОТКА ПРИНЦИПОВ ПОСТРОЕНИЯ
СИСТЕМ УПРАВЛЕНИЯ ТЕЛЕЖКАМИ КРАНА И
ЛЕБЁДКАМИ, ПРЕДНАЗНАЧЕННЫМИ ДЛЯ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ДЛИННОМЕРНЫХ ГРУЗОВ С
ЗАДАННЫМ НАКЛОНОМ 38
3.1 Анализ факторов, определяющих точность позиционирования
груза с заданным наклоном и разработка принципов их учёта при эксплуатации крана 38
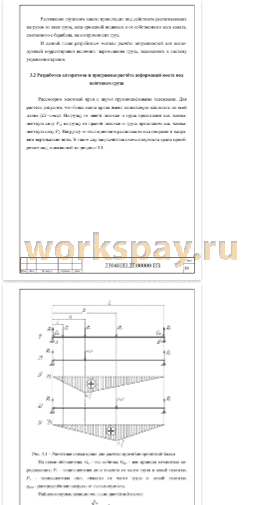
3.2 Разработка алгоритмов и программы расчёта деформаций моста
под действием груза 39
3.3 Разработка алгоритма и программы расчёта деформаций
грузовых канатов 50
ГЛАВА 4. РАЗРАБОТКА СИСТЕМ УПРАВЛЕНИЯ
ДВУХТЕЛЕЖЕЧНЫМ КРАНОМ ДЛЯ ТОЧНОГО
ПОЗИЦИОНИРОВАНИЯ ДЛИННОМЕРНЫХ ГРУЗОВ С
ЗАДАННЫМ НАКЛОНОМ 57
4.1 Разработка системы управления тележками 57
4.2 Разработка системы управления лебёдками 60
ГЛАВА 5. ЭКОНОМИЧЕСКАЯ ОЦЕНКА ПРЕДЛАГАЕМЫХ
ТЕХНИЧЕСКИХ РЕШЕНИЙ 63
ЗАКЛЮЧЕНИЕ 69
СПИСОК ЛИТЕРАТУРЫ 71
ПРИЛОЖЕНИЕ А 73
ПРИЛОЖЕНИЕ Б ПРОГРАММА РАСЧЁТА ПРОГИБА
МЕТАЛЛОКОНСТРУКЦИИ МОСТОВОГО КРАНА 74
ПРИЛОЖЕНИЕ В ПРОГРАММА РАСЧЁТА РАСТЯЖЕНИЯ
ГРУЗОВОГО КАНАТА 88
📖 Введение
В основном краны с двумя тележками в цехах используются для транспортирования груза с невысокой степенью точности его позиционирования, хотя существуют определённые ситуации в производстве, когда точность перемещения и установки заготовки имеет весомое значение. При перемещении длинномерных грузов в механообрабатывающем цехе, например, от одного станка к другому, было бы целесообразно устанавливать заготовку в обрабатывающий центр без использования различного рода подставок, направляющих и других технологических приспособлений. В то же время без подобной оснастки намного сложнее установить заготовку в необходимое положение с заданной точностью, чтобы избежать погрешностей в процессе обработке детали. Для решения этой задачи необходимо провести комплекс мероприятий, направленных на повышение точности позиционирования заготовки в обрабатывающем станке.
Одной из проблем, с которой придётся столкнуться в процессе транспортировки и установки груза, является неравномерное распределение массы заготовки между двумя грузоподъёмными тележками, что приводит к возникновению перекоса продольной оси длинномерного груза относительно горизонтали. Указанный вопрос можно решить, если установить систему управления, кото-
230402П.27.00000 ПЗ
Лист
6
Изм.
Лист
№ докум.
Подпись
Дата
рая самостоятельно бы устраняла перекос, регулируя работу приводов механизма подъёма груза.
Второй проблемой, с которой придётся столкнуться при выполнении работы, являются неравнозначные прогибы пролётной балки мостового крана под первой и второй тележками. Вследствие этого возникает наклон продольной оси длинномерной заготовки относительно горизонтали, что будет препятствовать точной установке груза.
Третьей проблемой, связанной с неравномерными нагрузками на две тележки, является растяжение канатов двух тележек. Разная величина деформации канатов приведёт к погрешности в перемещении груза.
В данной работе будет проведена разработка систем управления, способствующих опусканию груза с точным позиционированием и мер, учитывающих возникающие деформации в металлоконструкции и канатах.
✅ Заключение
В выпускной работе разработаны и подробно описаны три системы управления двухтележечными мостовыми кранами для согласованного перемещения груза в вертикальной плоскости двумя тележками с использованием тахогенераторов, электронного датчика уровня и цифрового датчика уровня. Была дана характеристика каждому из разработанных способов управления, описаны положительные и отрицательные стороны каждого способа.
В процессе создания комплексной системы управления двухтележечным мостовым краном, которая включает в себя систему управления тележками и систему управлению лебёдками, были определены факторы, которые влияют на точность позиционирования длинномерного груза в месте назначения. Произ- ведёны расчёты прогибов металлоконструкции и деформации грузового каната, созданы две программы для расчёта в среде Borland Delphi для автоматизации расчёта По результатам описанных действий были разработаны схемы управления тележками и лебёдками
После этого были выбраны определённые агрегаты крана для установки датчиков перемещения, необходимых для корректной работы системы: на барабанной установке механизма подъёма груза и на неприводной колёсной установке механизма перемещения тележки.
В разделе «Технико-экономческий анализ» был произведён расчёт единовременных затрат на проектирование и были показаны затраты на оборудование представленных систем управления приводами тедежек и приводами лебёдок.
Задачи, поставленные для выпускной квалификационной работы, выполнены. По результатам работы была отправлена заявка на изобретение «Двухтележечный мостовой кран», а также были отправлены заявки на регистрацию двух программ для расчёта прогибов металлоконструкции двухтележечных мостовых кранов и деформаций грузовых канатов.
📕 Список литературы
🖼 Скриншоты